Download
1 / 18
190 likes | 410 Vues
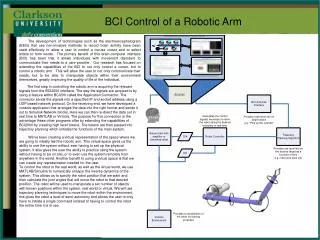
A Method of Robotic Actuation using Control Moment Gyros. Presenter: Ian Livingston AIAA YPSE ‘08 November, 21 st 2008. Overview. Introduction What is a CMG Reactionless Actuation Joint Torques vs. Body Torques Planar Robot Design Simulation Results

E N D
A Method of Robotic Actuation using Control Moment Gyros Presenter: Ian Livingston AIAA YPSE ‘08 November, 21st 2008
Overview • Introduction • What is a CMG • Reactionless Actuation • Joint Torques vs. Body Torques • Planar Robot Design • Simulation Results • Experimental Design (Functional Flow) • Hardware and GUI • Controller Design • Closed Loop Gimbal Control • Feed Forward Joint Angle Control • Video • Future Plans • Acknowledgements • Questions Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions
Control Moment Gyros (CMGs) • Components: • Constant speed reaction wheel • Gimbal motor (positioned along g axis) • Applications: • Momentum Storage • Propellant-less Attitude Control • Advantages: • Low Power (100x)1 • Spaceflight heritage Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions Equation for torque output Equation for reaction wheel momentum hr = Irw·wrw 1. Carpenter, Peck 2008
Reactionless Actuation • Reaction Forces from Mechanism • Actuator Reaction Forces • Caused by direct-drive motors. To rotate an object the motor rotates the base object in the opposite direction. • Inertial Reaction Forces • Caused by a spinning object not at the center of mass. • Advantages to Reaction- • Less Actuation: • Isolate subsystems • Reduce dumped • momentum to the base • structure. Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions CMG Arm from previous project team on the “Vomit Comet”
Joint Torques Versus Body Torques Joint Torques Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions Body Torques • CMGs create body torques • The motion of the arm remains the same • Only the torque caused by the off center reaction force needs to be absorbed using body torques. tcmg tmotor R2 T2 R2 q1 R2 t2 R q1 R2 t2
Planar Robot Arm Design • Purpose: • To create a CMG robot arm to demonstrate the advantages of body torques on space applications. • Design: • Two or more link free floating CMG arms • Air bearings to provide frictionless surface • Use Scissored Pair CMGs to remove • Gyroscopic effects and off axis torques • Previous work and Motivation: • Past teams built the reaction wheels for a CMG arm test • Only open-loop results were obtained from zero-g tests • This experiment was created to perform tests anytime Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions Photo: A. Soto
Scissored Pair CMGs • Advantages: • Eliminate off-axis torques • Direction of torque is fixed • No internal singularities • Cancelation of unwanted gyroscopic effects Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions Video: M. Peck
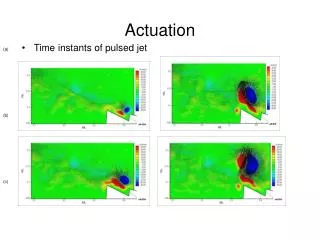
Simulation Analysis and Hypothesis1 • Simulation to determine power properties of CMG arm • Utilized several set ups for links and properties • Main focus on one link and two link robot arms both in parallel axis and perpendicular joint axes. • Simulation assumes 0 initial and final velocities and accelerations. Joint torque advantage Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions CMG advantage • From power simulation results: • CMGs are better for reaching tasks • Joint torques better for panning tasks D. Brown, 2008
Experimental Design (Functional Flow) Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions
Hardware and MATLAB GUI Design Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions
Controller Design Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions • Gimbal Angle is controlled by a PID closed loop control • Joint Angle is controlled using a Simulink model with feed forward control
CL Gimbal Angle Control Analysis Equations of motion for gimbal motor: Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions Transfer function for gimbal motor: Root locus, Bode Plots and gains: Gains: Kp= 3 Ki = 1 Kd = .1
CL Gimbal Angle Control Results Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions
Feed-forward Control Design • System is non-linear • Small angle approximation was not assumed since f can rotate up to 70° Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions Relationship between Joint angle and gimbal angle: • Current issues with Feed-Forward: • The runtime of the feed forward Simulink block is approximately .11 seconds. • This would limit the control system by 10 data points • At maximum voltage this is equivalent to 30 degree rotation
Video of CMG robot arm Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions
Future task, test, and Goals • Current Issues: • Joint angle control is not fully functional • No support for multi-links • Air canisters are currently leaking • Planned Tests: • Full systems test using feed forward control • Evaluation of power consumption versus joint angle control • Identified Improvements: • Characterize noise in potentiometer and build LQG control • Replace existing reaction wheels with smaller and faster COTS wheels • Reduce the size of the supporting arm and structure • Remove chain and replace with gears Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions
Acknowledgements • Daniel Brown, PhD. Candidate, Aerospace • Dr. Mason Peck • Space Systems Design Studio • Cornell CMG team Outline: -Introduction -What is a CMG -Reactionless Actuation -Joint Torques vs. Body Torques -Planar Robot Design -Simulation Results -Experimental Design -Hardware and GUI -Controller Design -CL Gimbal Control -Feed Forward Control -Video -Future Plans -Acknowledgements -Questions 1. DARPA SUMO spacecraft with CMG arms