Download

1 / 15
160 likes | 421 Vues
BY PAUL VANDADI & HARDIK SHAH. BCI CONTROL OF A ROBOTIC ARM. OUTLINE. Brief Introduction to BCI Purpose of the project Modeling using 3DS Max and Pro E Components of Cmo Controls and operation Conclusion Future Work. WHAT IS BCI?. A control system that does not depend on

E N D
BY PAUL VANDADI & HARDIK SHAH BCI CONTROL OF A ROBOTIC ARM
OUTLINE Brief Introduction to BCI Purpose of the project Modeling using 3DS Max and Pro E Components of Cmo Controls and operation Conclusion Future Work
WHAT IS BCI? A control system that does not depend on nerves and muscles. Messages are carried by electrical or other signals from the brain.
How it works? User produces brain signals that encode the message System translates these signals into device commands Interaction of two adaptive controllers BCI use is a new skill that both user and system must master and maintain
Goal of BCI To provide A new control option (to people with severe motor disabilities) Functions that normal muscular control can’t address (to able-bodied people)
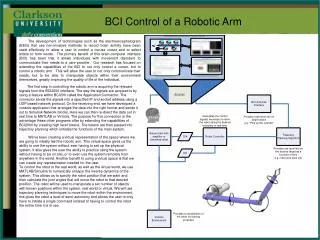
BCI Control of a robotic arm Purpose : Control a robot’s arm using BCI Create a virtual representation of a robot’s working environment. Test the physical system without actually setting it up. User can practice without having to be on site
Components of cmo User gets two options Uses 19 frames 6 objects 2 cameras 2 groups
Controls Left/Right Arrow : Translation of Base Plate. Num 8 and Num 5 : Translation of Shoulder. Num 7 and Num 4 : Rotation of Shoulder. Num 9 and Num 6 : Rotation of Gripper. Num 1 and Num 3 : Rotation of Elbow. Num . and Num 0 : Opening and Closing of Gripper
Components of Robotic Arm Base Plate Shoulder Upper Arm Fore Arm Gripper
Conclusion Lot more things yet to add. Project will be done probably by end of Summer 2007. If all works out well it can be very useful to physically handicapped person.
Future Work Add more objects Make MATLAB code ready Try the code on actual robot rather than a virtual one.