Download

1 / 10
130 likes | 427 Vues
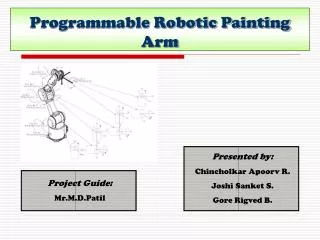
The Robotic Arm. From your friendly neighborhood Allie!. Degrees of Freedom. Each degree of freedom is a point or “joint” in a robot arm that allows it to bend, translate and rotate. When building something like a robot arm you want very few degrees of freedom (mainly due to cost)

E N D
The Robotic Arm From your friendly neighborhood Allie!
Degrees of Freedom • Each degree of freedom is a point or “joint” in a robot arm that allows it to bend, translate and rotate. • When building something like a robot arm you want very few degrees of freedom (mainly due to cost) • Encoders!!!
Encoders • A type of sensor that’s attached to the joint or rotating object that measures rotation. • The most common encoders use optical sensors • Why? Well I’ll tell you why! When you use encoders your robots will be able to determine things like it’s velocity, acceleration and such! • Down side? The X-TREAM math.
Denavit-Hartenberg Convention (DH) • Free Body Diagrams (FBD) • Only two motions, translate and rotate • Only X, Y and Z axis • The effector (hand/claw,clamp,hook, ect.) usually has many DOF, so on simple diagrams like these it’s just a symbol with no real meaning
Robot Workspace • Also known as reachable space • Depends on the lengths of the arm links, the DOF angle/translation limitations, the angle at which something is picked up and so on! • When the arm is fully stretched out, all the places the effectors (claps) can reach.
Workspace Examples Why, would you look at these excellent examples of work space!
Work Time! Alright, your job! Find pictures of three robotic arms. One with three DOF, one with four DOF and one with five DOF. When you’ve done that make an FBD for each picture! Oh and why not calculate the workspace for each picture as well! YAY! *Remember that the end effector doesn't count!