Development of an Autonomous Warehouse Forklift System for Efficient Material Handling
The AWFUL project aims to create a reliable autonomous system for warehouse operations, including shipping, receiving, and storage. This innovative system utilizes robotic forklifts that depend on precise data communication within the stow and wait zone through wired interfaces. Critical elements such as zero insertion force and path-following algorithms are implemented using opto-reflectors and geared motors. With dedicated movement algorithms, each forklift navigates a structured grid layout, ensuring exact pallet handling without external interference, paving the way for advanced automation in material management.

Development of an Autonomous Warehouse Forklift System for Efficient Material Handling
E N D
Presentation Transcript
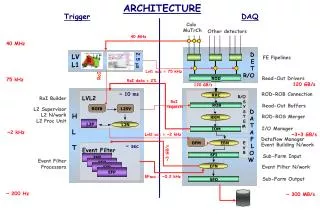
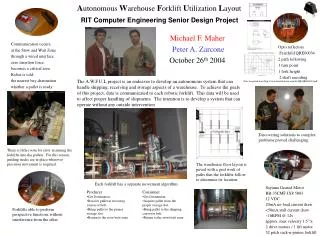
Michael F. Maher Peter A. Zarcone October 26th 2004 Autonomous Warehouse Forklift Utilization Layout Communication occurs: at the Stow and Wait Zone through a wired interface zero insertion force becomes a critical area Robot is told: the nearest bay destination whether a pallet is ready Opto reflectors Fairchild QRE00034 2 path following 1 turn point 1 fork height 2 shaft encoding The A.W.F.U.L project is an endeavor to develop an autonomous system that can handle shipping, receiving and storage aspects of a warehouse. To achieve the goals of this project, data is communicated to each robotic forklift. This data will be used to affect proper handling of shipments. The intention is to develop a system that can operate without any outside intervention Data Acquired from http://www.fairchildsemi.com/ds/QR/QRE00034.pdf RIT Computer Engineering Senior Design Project Discovering solutions to complex problems proved challenging. There is little room for error in aiming the forklifts into the pallets. For this reason, guiding tracks are in place wherever precision movement is required. The warehouse floor layout is paved with a grid work of paths that the forklifts follow to determine its location. Each forklift has a separate movement algorithm. Sayama Geared Motor RB-35CMF JX8 5803 12 VDC 20mA no-load current draw <50mA stall current draw ~10RPM @ 12v approx. max velocity 1.5”/s 2 drive motors / 1 lift motor 32 pitch rack-n-pinion forklift • Producer • Get Destination. • Receive pallet at receiving conveyor belt. • Bring pallet to the proper storage slot. • Return to the stow/wait zone. • Consumer • Get Destination • Acquire pallet from the proper storage slot. • Bring pallet to the shipping conveyor belt. • Return to the stow/wait zone. Forklifts able to perform perspective functions without interference from the other.