Download
1 / 1
10 likes | 198 Vues
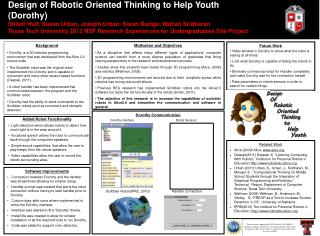
Design of Robotic Oriented Thinking to Help Youth (Dorothy) Shiloh Huff, Susan Urban, Joseph Urban, Sarah Rainge, Mohan Sridharan Texas Tech University 2012 NSF Research Experiences for Undergraduates Site Project. Background

E N D
Design of Robotic Oriented Thinking to Help Youth(Dorothy)Shiloh Huff, Susan Urban, Joseph Urban, Sarah Rainge, Mohan SridharanTexas Tech University 2012 NSF Research Experiences for Undergraduates Site Project Background • Dorothy, is a 3D/robotics programming environment that was developed from the Alice 2.0 source code. • The Scribbler robot was the original robot implemented into Dorothy and is capable of movement and many other sensor based functions (Deepak, 2011). • A robot handler has been implemented that communicates between the program and the Scribbler robot. • Dorothy had the ability to send commands to the Scribbler robots such as movement and obstacle detection. Motivation and Objectives • As a discipline that affects many different types of applications, computer science can benefit from a more diverse population of graduates that bring varying perspectives to the research and development process. • Studies show that students learn better through 3D programming (Alice, 2009) and robotics (Wellman, 2009). • 3D programming environments are favored due to their simplistic syntax while robotics has strong real world effects. • Previous REU research has implemented Scribbler robots into the Alice2.0 software but lacks the full functionally of the robots (Urban, 2011). • The objective of this research is to increase the capabilities of scribbler robots in Alice2.0 and streamline the communication and software in general. Future Work • Video window in Dorothy to show what the robot is seeing at all times. • Limit what Dorothy is capable of telling the robots to do. • Eliminate command prompt for Handler completely and make Dorothy wait for the connection herself. • Pass parameters to robots sensors in order to search for certain things. Design Of Robotic Oriented Thinking to Help Youth Design Of Robotic Oriented Thinking to Help Youth Dorothy Communication Dorothy InterfaceRobot Sensors Scribbler Robot(IPRE, 2010) Handler connection Added Robot Functionality • Light detection which allows robots to detect how much light is in the area around it. • Vocalized speech allows the robot to communicate back through the computers speakers. • Simple sound capabilities that allow the user to play beeps from the robots speakers. • Video capabilities allow the user to record the robots surrounding area. Related Work • Alice (2009) Alice, www.alice.org. • Deepak(2011) Deepak, K. “Learning Computing With Robots,” Institution for Personal Robots in Education http://www/roboteducation.org. • Urban (2011) Urban, S., Urban, J., Sridharan, M., Mengel, S. “Computational Thinking for Middle School Students through the Integration of Graphical Programming and Robotics,” Technical Report. Department of Computer Science, Texas Tech University. • Wellman (2009) Wellman, B., Anderson, M, Vrbsky, S. “PREOP as a Tool to Increase Student Retention in CS”. University of Alabama. • IPRE(2010) The Institute for Personal Robots in Education, http://www/roboteducation.org. Software Improvements • Connection between Dorothy and the handler was streamlined allowing for simpler setup. • Handler prompt was created that starts the robot connection without having to start handler prior to Dorothy. • Custom drag-able icons where implemented to refine the Dorothy interface. • Interface was altered to fit a “Dorothy” theme. • Install file was created to allow for simpler installation of all the required tools to run Dorothy. • Code was added to support color detection. This research is supported by NSF Grant No. CNS 1005212. Opinions, findings, conclusions, or recommendations expressed in this paper are those of the author(s) and do not necessarily reflect the views of NSF.