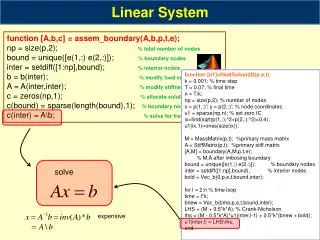
Linear Equation System
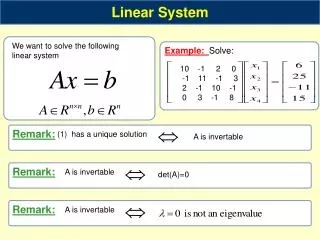
Linear Equation System. Engineering Mathematics I . Linear Equation System. Augmented matrix A. Gauss Elimination (1). Eliminate. Upper triangular matrix. Gauss Elimination (2). Backward substitution. 4. Example 1. Pivot element. * Replace 2 nd eq. (2 nd eq.) – 2x(1 st eq.)

Linear Equation System
E N D
Presentation Transcript
Linear Equation System Engineering Mathematics I
Linear Equation System Engineering Mathematics I Augmented matrix A
Gauss Elimination (1) Eliminate Engineering Mathematics I Upper triangular matrix
Gauss Elimination (2) Engineering Mathematics I Backward substitution 4
Example 1 Pivot element Engineering Mathematics I * Replace 2nd eq. (2nd eq.) – 2x(1st eq.) * Replace 3rd eq. (3rd eq.) + 1x(1st eq.)
Example 1 Engineering Mathematics I * Replace 3rd eq. (3rd eq.) + 3x(2nd eq.) Upper triangle
Possibilities (1) • Linear equation system has three possibilities of solutions Engineering Mathematics I
Example 2 • Kirchhoff's current Law (KCL): At any point of a circuit, the sum of the inflowing currents equals the sum of out flowing currents. • Kirchhoff's voltage law (KVL): In any closed loop, the sum of all voltage drops equals the impressed electromotive force. Engineering Mathematics I
Example #2 Engineering Mathematics I • Node P: i1 – i2 + i3 = 0 • Node Q: -i1 + i2 –i3 = 0 • Right loop: 10i2 + 25i3 = 90 • Left loop: 20i1 + 10i2 = 80
Linear Independence • Let a1, …, am be any vectors in a vector space V. Then an expression of the form c1a1 + … + cmam (c1, …, cm any scalars) is called linear combination of these vectors. • The set S of all these linear combinations is called the span of a1, …, am. • Consider the equation: c1a1 + … + cmam= 0 • If the only set of scalars that satisfies the equation is c1 = … = cm = 0, then the set of vectors a1, …, am are linearly independent. Engineering Mathematics I
Linear Dependence • Otherwise, if the equation also holds with scalars c1, …, cm not all zero (at least one of them is not zero), we call this set of vectors linearly dependent. • Linear dependent at least one of the vectors can be expressed as a linear combination of the others. • If c1≠ 0, a1 = l2a2 + … + lmam where lj = -cj/c1 Engineering Mathematics I
Example 3 • Consider the vectors: i = [1, 0, 0], j = [0, 1, 0] and k = [0, 0, 1], and the equation: c1i + c2j + c3k = 0 • Then: [(c1i1+c2j1+c3k1), (c1i2+c2j2+c3k2), (c1i3+c2j3+c3k3)] = 0 [c1i1, c2j2, c3k3] = 0 c1= c2 = c3 = 0 • Consider vectors a = [1, 2, 1], b = [0, 0, 3], d = [2, 4, 0]. Are they linearly independent? Engineering Mathematics I
Rank of a Matrix • There are some possibilities of solutions of linear equation system: • no solution, single solution, many solution. • Rank of matrix a tool to observe the problems of existence and uniqueness. • The maximum number of linearly independent row vectors of a matrix A is called the rank of A. • Rank A = 0, if and only if A = 0. Engineering Mathematics I
Example 4 Engineering Mathematics I • Matrix A above has rank A = 2 • Since the last row is a linear combination of the two others (six times the first row minus ½ times the second), which are linearly independent.
Example 5 Engineering Mathematics I
Example 6 Engineering Mathematics I
Example 7 Engineering Mathematics I
Some Notes • For a single vector a, then the equation ca = 0, is satisfied if: • c = 0, and a≠ 0 a is linearly independent • a = 0, there will be some values c ≠ 0 a is linearly dependent. • Rank A = 0, if and only if A = 0. • Rank A = 0 maximum number of linearly independent vectors is 0. • If A = 0, there will be some values c1, …, cm which are not equal to 0, then vectors in A are linearly dependent. Engineering Mathematics I
Rank of a Matrix (2) • The rank of a matrix A equals the maximum number of linearly independent column vectors of A. • Hence A and AT have the same rank. • If a vector space V is such that it contains a linearly independent set B of n vectors, whereas any set of n + 1 or more vectors in V is linearly dependent, then V has ndimension and B is called a basis of V. • Previous example: vectors i, j, and k in vector space R3. R3 has 3 dimension and i, j, k is the basis of R3. Engineering Mathematics I
General Properties of Solutions • A system of m linear equations has solutions if and only if the coefficient matrix A and the augmented matrix Ã, have the same rank. • If this rank r equals n, the system has one solution. • If r < n, the system has infinitely many solutions. Engineering Mathematics I