Understanding Controllability in Linear SISO Systems
This lecture elaborates on the fundamental concepts of controllability in Single Input Single Output (SISO) systems. It discusses the algebraic controllability theorem, emphasizing the significance of the controllability matrix and its rank in determining if a system can be controlled. The relationship between system dynamics, state vectors, and the desired behavior is explored, along with the importance of stability. Through examples and transformations, the lecture illustrates how to assess and achieve controllability, paving the way to effective control implementations.

Understanding Controllability in Linear SISO Systems
E N D
Presentation Transcript
Lecture 31. Controllability The general idea of control The algebraic controllability theorem SISO systems to be controlled to zero
We know that dynamics can be modeled by We want to make some subset or combination of the states to do something we want. We call this the output (You will see some cases in which the output depends directly on the input, but we will by and large not do this, setting D equal to zero)
We are generally going to restrict ourselves to linear single input-single output (SISO) systems scalars Denote the dimension of the state vector by N Then A is a N x N matrix b a Nx 1 (column) vector c a I xN (row) vector
We want to make y do what we want. This has some implications for what x does For now, let me focus on x and not worry about y — If I can make x do what I want, y is easy Denote the desired behavior of x by xd, the error then I can write what we want
Write the differential equations Split the equations The idea is to find ud — we’ll work on this another time open loop control closed loop correction
We’re going to start with xd = 0 We will eventually (given “worlds enough and time”) look at tracking I don’t need the subscript, so I’ll stop writing it for now The control problem for now is to find u such that x —> 0 Is it possible to solve the problem?! closed loop correction BTW. If the problem is stable, then we don’t need control.
We know how to find xgiven u We simply find the state transition matrix and apply the formulas But that may be easier said than done; there are other things we can do. It also doesn’t tell us how to find u to make x go to zero
We saw last time that there are situations where the input cannot reach all the state The sense of this is not always clear If any of the elements of z is not connected to u, that element cannot be controlled This may or may not be an actual problem — more on that anon We need a criterion whereby we can tell if a system is controllable It should be based on A and B, so that we can figure this out before wasting too much time But first
Stability for any problem there will be a homogeneous solution which we can write Suppose s ≠ 0: If Re(si) < 0 for alli the homogeneous solution will decay in time We call this (asymptotically) stable If Re(si) > 0 for anyi the homogeneous solution will grow in time We call this (linearly) unstable If Re(si) = 0 for alli the homogeneous solution will oscillate in time We call this marginally stable
If s = 0 we have algebraic eigenfunctions. We’ll be dealing with these as special cases. Stability is important because in real life there will always be some tiny part of the homogeneous solution in the answer If the solution contains an unstable part, it will grow without bound, and the uncontrolled system will “blow up” We need controls to prevent this Let’s suppose that we need or want control and return to the question IS CONTROL POSSIBLE?
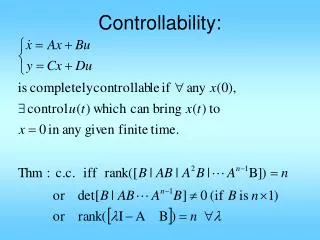
The algebraic controllability theorem For a general linear system The controllability matrix is The system is controllable if and only if the rank of Q = N BTW: The theorem is true for multi-input systems
The matrix Q is square, NxN, for a single input system If there are M inputs then Q has N rows and MN columns An NxN matrix has rank Niff its determinant is nonzero, so the rank criterion works for square and nonsquare matrices Let’s look at a simple example to see how this goes
u and we can draw a block diagram of this x3 -3 x2 x1 + u - -2 -1
You can find the rank by row reduction or find the determinant Either way, it is controllable
So, what happens next? Not only does this give us a controllability test, but it starts us on the road to putting the basic problem in companion form We want to modify A and b, and we do this using another TAT-1 transformation But, what is T? It is NOT the same T that we used to diagonalize
We start with Q (and restrict ourselves to SI systems) Take the last row of Q This is the first row of T, and we build the whole T on the next slide
and then the z equations follow the same way as before This is not the same z as that we found diagonalizing
This can be done by hand, but is a little messy and lot tedious, so . . .
We can finally apply the differential equation in transformed form Of course, the eigenvalues of A1 are the same as those of A
This is not the same z as the z that we used in the diagonalization exercises and we have a nice block diagram for this + z1 u - -6 -11 -6
The old block diagram u x3 -3 x2 x1 + u - -2 -1
It is interesting note that the transfer function approach would give us the same dynamics I think I will leave that for you to establish. Let’s revisit the diagonalizing transformation for this case
What do we need to do? We need the matrix of the eigenvectors, V = T-1 We need its inverse, V-1 = T The new matrix is diagonal with its nonzero elements equal to the eigenvalues of A Summarize on the next slide
u -3 u -2 u -1
So we have three different pictures corresponding to the same dynamics
Original problem u x3 -3 x2 x1 + u - -2 -1
Companion (phase canonical) form + z1 u - -6 -11 -6
u Diagonalized form -3 u -2 u -1
Let’s get back to thinking about the companion form dynamics The eigenvalues are -3, -2, and -1 The characteristic polynomial must be
Consider another three dimensional system, this one unstable, so we are more motivated to find a control Diagonalization The eigenvalues of A are -2, -1 and +1 The matrix of the eigenvectors is
Its inverse is T so we have Tb which suggest that this a controllable system
We can go through the controllability theorem for this one The determinant is +6, so it is invertible and the system is controllable Now we can move on to find the companion form of A and b
So that companion form We can find A1 and b1 once we know the eigenvalues Why do we need to go through the ritual of finding T? Because we need to get x back!
Now let’s reflect on the control aspects of this problem Suppose we want x to go to zero. It will go to zero if z goes to zero so we need to address that issue. The system is unstable because we have a positive eigenvalue We have the transformed problem in z space
The bottom row of A1 contains the coefficients of the characteristic polynomial
We can move the eigenvalues by choosing u proportional to z and the z equation becomes
Now so our forced (inhomogeneous) differential equation becomes an unforced homogeneous differential equation
We know that the coefficients can be directly connected to the characteristic polynomial We have eigenvalues of -2, -1 and +1 The first two are fine — suppose we move the +1 to -1 The characteristic polynomial becomes so the last row coefficients must be: -2, -5, -4
So the closed loop A matrix is and the dynamics of the closed loop system are z1 - -4 -5 -2
The companion form matrix A1 was so the open loop z system is + z1 u - -2 1 2
Those are the gains in z space; we need gains in x space or, to put it another way and, putting in the numbers
I will leave it to you to draw the block diagram that goes with this matrix