Download
1 / 5
50 likes | 122 Vues
Explore Cartesian and Polar coordinate systems to describe 2D motion, illustrating tangent and normal directions, speed, velocity, and acceleration with T/N coordinates.

E N D
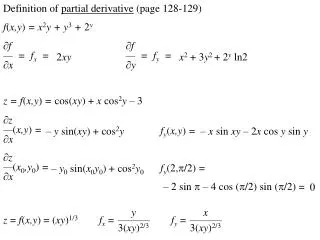
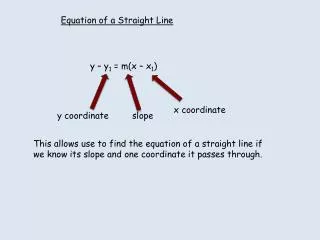
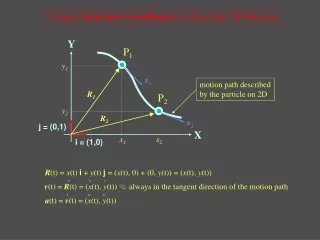
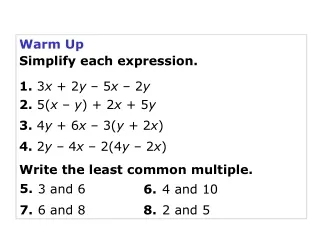
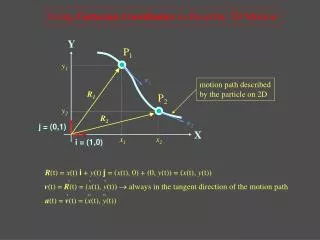
Y v1 v2 motion path described by the particle on 2D R1 j = (0,1) R2 y1 y2 x1 x2 i = (1,0) X Using Cartesian Coordinates to Describe 2D Motion P1 P2 R = xi + yj = (x, 0) + (0, y) = (x, y) R(t) = x(t) i + y(t) j = (x(t), 0) + (0, y(t)) = (x(t), y(t)) ... v(t) = R(t) = (x(t), y(t)) always in the tangent direction of the motion path ..... a(t) = v(t) = (x(t), y(t))
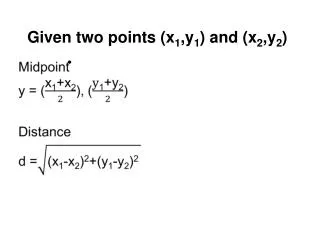
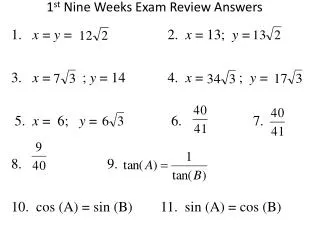
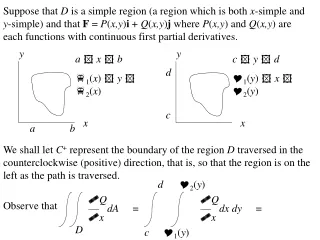
Y P1 v1 v2 q1 R1 motion path described by the particle on 2D r1 R2 eq’ er er’ radial acceleration eq X angle acceleration X Using Polar Coordinates to Describe 2D Motion R(t) = r(t) er(t) q information is already contained in er, so eqdoes not show up in R(t) If R1(t) = r1(t) er, R2(t) = r2(t)er’, R1(t) + R2(t) (r1(t) + r2(t)) er since er(t) er’(t). So, how do we do vector algebra in polar coordinates? ... v(t) = R (t) = r(t) er(t) + r(t) er(t) = vr(t) er(t) + vq(t) eq(t) always in the tangent direction of the motion path .... . .. a(t) = v (t) = r(t) er(t) + 2r(t) er(t) + r(t) er(t) = ar(t) er(t) + aq(t) eq(t)
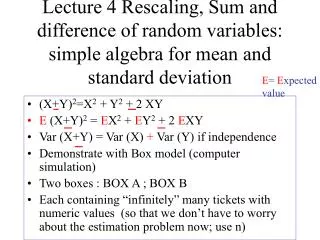
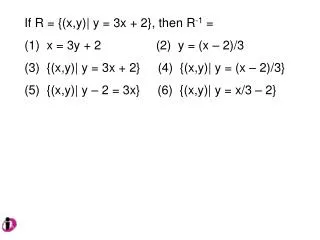
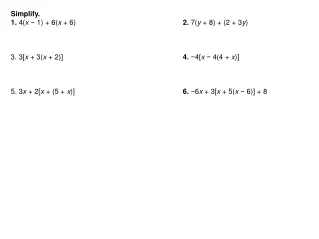
Y P1 P1 motion path described by the particle on 2D S(t3) X S(t2) S(t1) It is no longer required for a fixed origin. Using Tangential/Normal Coordinates to Describe 2D Motion Using T/N coordinate, one is only interested in the velocity and acceleration of the moving particles. Hence, there is no position vector. It is best to imagine you are traveling along the motion path (see figure). T/N coordinate system relies on the arc-length variable, S, to measure the velocity and acceleration. Given any instant, say t0, for any t > t0 S(t) measures the distance traveled by the particle From t0 to t. To define the speed, consider t > t0, the limit • S(t) = limtt0 S(t)/(t – t0) defines the velocity at point P1. Imagine the limit as if there are t3 > t2 > t1 > … > t0 and measure the corresponding S(t3), S(t2), S(t1), … In the limit tt0, S(t) 0 and t – t0 0. But its ratio measures the speed of the velocity.
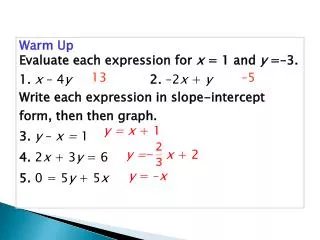
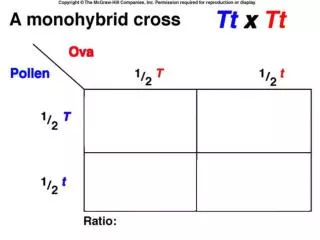
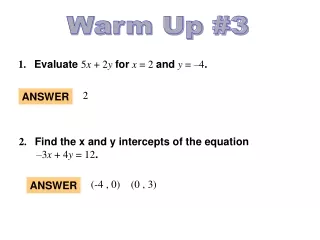
P1 et en (tangential) direction of the velocity (see the red arrow) magnitudeof velocity tangent acceleration measures how fast S(t) changes in time. normal acceleration, which describes the change in the direction of motion and points toward the center of curvature at the given position of the motion path (see the blue arrow). Using Tangential/Normal Coordinates to Describe 2D Motion • But, S(t) measures the speed, which is the magnitude of the velocity. The direction of the velocity has not yet been specified. So, where is it? Recall from Cartesian, Polar coordinate systems, the velocity is always in the tangent direction of the motion path. Therefore, the velocity expressed in T/N coordinate is • v(t) = S(t) et (t) The acceleration follows immediately by differentiation: • •• • a(t) = v(t) = S(t) et(t) + S(t) et(t)= at(t) et(t) + an(t) en(t)
Y P1 motion path described by the particle on 2D P2 en et en X et Using Tangential/Normal Coordinates to Describe 2D Motion