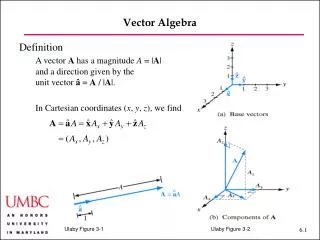
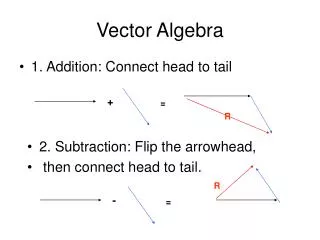
Vector Algebra
Vector Algebra. Course Content. Introduction to the Course Biomechanical Concepts Related to Human Movement Anatomical Concepts Related to Human Movement Applications in Human Movement. Biomechanical Concepts. Basic Kinematic Concepts Vector Algebra Basic Kinetic Concepts. Vector Algebra.

Vector Algebra
E N D
Presentation Transcript
Course Content • Introduction to the Course • Biomechanical Concepts Related to Human Movement • Anatomical Concepts Related to Human Movement • Applications in Human Movement
Biomechanical Concepts • Basic Kinematic Concepts • Vector Algebra • Basic Kinetic Concepts
Vector Algebra • Introductory Concepts • Vector Composition • Vector Resolution
Vector Algebra • Introductory Concepts • Vector Composition • Vector Resolution
Vector Algebra: Introductory Concepts • Definitions • Vector representation • Muscle force vectors
Definitions • What is vector algebra? • What is a scalar quantity? • What is a vector quantity?
Vector Representation +y +y -x -x +x +x +z +z -y -y 90° 180° 0° = -40° 270°
Force Vector Line of force (or pull). Length represents magnitude. Tail represents point of force application. Arrow head represents direction. Vector Representation • A vector quantity is represented by an arrow.
Luttgens & Hamilton. (2001). Fig 10.1. p. 266. Luttgens & Hamilton. (2001). Fig 10.1. p. 266. Examples of Vector Representations
Muscle Force Vectors • Point of application • Direction • Magnitude • Line of force Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Muscle Force Vectors • Biceps brachii Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Muscle Force Vectors • Brachialis Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Muscle Force Vectors • Deltoid Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Muscle Force Vectors • Pectoralis major Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Muscle Force Vectors • Pectoralis major Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Muscle Force Vectors • Pectoralis minor Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Vector Algebra • Introductory Concepts • Vector Composition • Vector Resolution
Vector Composition • Process of determining a resultant vector from two or more vectors • New vector called the resultant (R)
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-3. p. 63. Vector Composition: Graphical Solution (Chaining) • Select a vector to start with and draw it, maintaining direction and magnitude.
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-3. p. 63. Vector Composition: Graphical Solution (Chaining) • Chain the tail of the next vector to the head of the first, maintaining direction and magnitude from original vector.
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-3. p. 63. Vector Composition: Graphical Solution (Chaining) • Continue to chain vectors in this manner until they are all chained.
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-3. p. 63. Vector Composition: Graphical Solution (Chaining) • Draw in the resultant vector by connecting the tail of the first vector in the chain to the head of the last vector in the chain.
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-3. p. 63. Vector Composition: Graphical Solution (Chaining) • The head of the resultant vector will be the end that is connected to the head of the last vector.
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-3. p. 63. Vector Composition: Graphical Solution (Chaining) Vector P = 50 N What is the magnitude of the resultant vector?
R B D C A Hamilton & Luttgens. (2001). Fig 10.2. p. 267. Order of chaining does not matter. If A=50 N of force, what would you estimate the magnitude of R to be? 70° How would you state the direction of R? 0°
Hamilton & Luttgens. (2001). Fig 10.2. p. 267. The same R can be achieved from an infinite combination of vectors.
Magnitude of R is dependent on direction of components, not just magnitude. If F=300 N of force, what would you estimate the magnitude of R to be? How would you state the direction of R?
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-6. p. 64.
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-12. p. 69. If Q=50 N of force, what would you estimate the magnitude of R to be? How would you state the direction of R?
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-13. p. 69.
Vector Algebra • Introductory Concepts • Vector Composition • Vector Resolution
Vector Resolution • Taking a resultant vector and breaking it down into 2 or more component vectors
There is an infinite # of combinations of component vectors for any given R. • 8 = 4 + 4 • 8 = 3 + 1 + 2 + 2 • 8 = 10 + (-2) • 8 = 1.5 + 6.5
So, how do we know which components to resolve for? • 2D (3D conceptually) • Orthogonal
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-33. p. 79. So, how do we know which components to resolve for? • 2D (3D conceptually) • Orthogonal • Horizontal & Vertical • Exceptions • Muscles • Other
From: LeVeau, B.F. (1992). William & Lissner’s biomechanics of human motion (3rd ed). Philadelphia: W.B. Saunders. Fig. 4-33. p. 79. Vector Resolution:Graphical Solution • Draw a rectangle which includes R as the diagonal of the rectangle.
Hamilton & Luttgens. (2001). Fig 10.1. p. 266. If Vr was 200 m/s, what is the magnitude of Vv and Vh? Vv or Vy Vh or Vx Why might you want to do this?
Hamilton & Luttgens. (2001). Fig 10.1. p. 266. Vv or Vy Vh or Vx
Resolving Muscle Force Vectors Direction of resolution is in direction of interest. In this case, movement of shoulder girdle isvertical(elevation & depression) and horizontal (protraction & retraction). Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Resolving Muscle Force Vectors • Draw line of pull. • Draw vertical component. • Draw horizontal component. • Complete rectangle to assure proper magnitudes of components. Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
What are the linear effects produced by this muscle? • Draw line of pull. • Draw vertical component. • Draw horizontal component. • Complete rectangle to assure proper magnitudes of components. Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Draw line of pull. • Draw vertical component. • Draw horizontal component. • Complete rectangle to assure proper magnitudes of components. Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
If the resultant force is 100 N, how much force is acting to elevate the scapula? To retract the scapula? • Draw line of pull. • Draw vertical component. • Draw horizontal component. • Complete rectangle to assure proper magnitudes of components. Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Mechanical Axis of a Bone • The longitudinal axis of the bone
Draw a line to represent the mechanical axis of the bone. Resolving Muscle Force Vectors Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Draw in the normal component first. Fnormal Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Draw in the tangential component second. Fnormal Ftangential Source: Mediclip. (1995). Baltimore: Williams & Wilkins.
Complete the rectangle to make sure that you have the lengths of your component vectors correct. Fnormal Ftangential Source: Mediclip. (1995). Baltimore: Williams & Wilkins.