Download
1 / 44
440 likes | 582 Vues
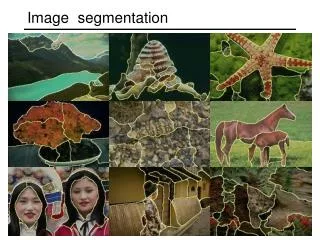
Image-Based Segmentation of Indoor Corridor Floors for a Mobile Robot. Yinxiao Li and Stanley T. Birchfield The Holcombe Department of Electrical and Computer Engineering Clemson University { yinxial, stb }@ clemson.edu. Typical Corridor Images. Low contrast. Common Reflections.

E N D
Image-Based Segmentation of Indoor Corridor Floors for a Mobile Robot Yinxiao Li and Stanley T. Birchfield The Holcombe Department of Electrical and Computer Engineering Clemson University { yinxial, stb }@clemson.edu
Typical Corridor Images Low contrast Common Reflections Specular Reflections
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Previous Work Free space detection Floor detection Previous approaches Apply planar homographies to optical flow vectors (Kim 2009, Zhou 2006) Stereo homographies (Fazl-Ersi 2009) Geometric reasoning (Lee 2009) Limitations Assume ceiling visible Computational efficiency Calibrated cameras Previous approaches • Stereo Matching (Sabe 2004) • Optical Flow (Stoffler 2000, Santos-Victor 1995 • Combination of color and histogram (Lorigo 1997) Limitations • Need motion • require different colors for floor and wall • Computational efficiency • Calibrated cameras
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Douglas-Peucker Algorithm • An algorithm that: • Reduces the number of points in a curve that is approximated by a series of points • Focus on maximum distance between the original curve and the simplified curve • Finds a similar curve with fewer points http://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93Peucker_algorithm David Douglas & Thomas Peucker, "Algorithms for the reduction of the number of points required to represent a digitized line or its caricature", The Canadian Cartographer 10(2), 112–122 (1973)
Douglas-Peucker Algorithm • An algorithm that: • Reduces the number of points in a curve that is approximated by a series of points • Focus on maximum distance between the original curve and the simplified curve • Finds a similar curve with fewer points http://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93Peucker_algorithm David Douglas & Thomas Peucker, "Algorithms for the reduction of the number of points required to represent a digitized line or its caricature", The Canadian Cartographer 10(2), 112–122 (1973)
Douglas-Peucker Algorithm • An algorithm that: • Reduces the number of points in a curve that is approximated by a series of points • Focus on maximum distance between the original curve and the simplified curve • Finds a similar curve with fewer points http://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93Peucker_algorithm David Douglas & Thomas Peucker, "Algorithms for the reduction of the number of points required to represent a digitized line or its caricature", The Canadian Cartographer 10(2), 112–122 (1973)
Douglas-Peucker Algorithm • An algorithm that: • Reduces the number of points in a curve that is approximated by a series of points • Focus on maximum distance between the original curve and the simplified curve • Finds a similar curve with fewer points http://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93Peucker_algorithm David Douglas & Thomas Peucker, "Algorithms for the reduction of the number of points required to represent a digitized line or its caricature", The Canadian Cartographer 10(2), 112–122 (1973)
Douglas-Peucker Algorithm • An algorithm that: • Reduces the number of points in a curve that is approximated by a series of points • Focus on maximum distance between the original curve and the simplified curve • Finds a similar curve with fewer points http://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93Peucker_algorithm David Douglas & Thomas Peucker, "Algorithms for the reduction of the number of points required to represent a digitized line or its caricature", The Canadian Cartographer 10(2), 112–122 (1973)
Douglas-Peucker Algorithm • An algorithm that: • Reduces the number of points in a curve that is approximated by a series of points • Focus on maximum distance between the original curve and the simplified curve • Finds a similar curve with fewer points http://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93Peucker_algorithm David Douglas & Thomas Peucker, "Algorithms for the reduction of the number of points required to represent a digitized line or its caricature", The Canadian Cartographer 10(2), 112–122 (1973)
dallowed Modified Douglas-Peucker Algorithm original algorithm: dallowed is constantmodified algorithm: dallowed is given by half-sigmoid function original modified
Detecting Line Segments (LS) Compute Canny edges
dallowed Detecting Line Segments (LS) • Compute Canny edges • Modified Douglas-Peucker algorithm to detect line segments • Vertical LS: slope within ±5° of vertical direction • Horizontal LS: Slope within ±45° of horizontal direction
dallowed Detecting Line Segments (LS) • Compute Canny edges • Modified Douglas-Peucker algorithm to detect line segments • Vertical LS: slope within ±5° of vertical direction • Horizontal LS: Slope within ±45° of horizontal direction • 3. Pruning line segments (320x240) • Vertical LS: length 60 pixels • Horizontal LS: length 15 pixels • Vanishing point (height selection):The vanishing point is computed as the mean of the intersection of pairs of non-vertical lines
dallowed Detecting Line Segments (LS) • Compute Canny edges • Modified Douglas-Peucker algorithm to detect line segments • Vertical LS: slope within ±5° of vertical direction • Horizontal LS: Slope within ±45° of horizontal direction • 3. Pruning line segments (320x240) • Vertical LS: length 60 pixels • Horizontal LS: length 15 pixels • Vanishing point (height selection):The vanishing point is computed as the mean of the intersection of pairs of non-vertical lines
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Score Model Weights • is assigned to each horizontal line segment and we use a threshold to select those ones that beyond the Structure Score Homogeneous Score Bottom Score
Score Model – Structure Structure =>Threshold=? Given a typical corridor image
Score Model – Structure Structure =>Threshold=? Given a typical corridor image Find gradient magnitude greater than a threshold T1
Score Model – Structure Structure =>Threshold=? • Given a typical corridor image • Find gradient magnitude greater than a threshold T1 • Find gradient magnitude greater than a threshold T1 and intensity less than a threshold T2. The figure shows the mask pixels image. • We have a training data over 200 images to determine T1 and T2 by SVM over 800 points.
Score Model – Structure Structure =>Threshold= TLC Given a typical corridor image Find gradient magnitude greater than a threshold T1 Find gradient magnitude greater than a threshold T1 and intensity less than a threshold T2. The figure shows the mask pixels image. Compute the average intensity of the make pixels image over original image and get a threshold value TLC
Score Model – Structure Structure =>Threshold= TLC Given a typical corridor image Find gradient magnitude greater than a threshold T1 Find gradient magnitude greater than a threshold T1 and intensity less than a threshold T2. The figure shows the mask pixels image Compute the average intensity of the make pixels image over original image and get a threshold value TLC Compute the distance between the line segments and structure blocks
Score Model – Structure Comparison of different threshold methods Ridler-Calvard Otsu Our method is able to get rid of the spurious pixels on the floor caused by reflections or shadows Our method
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Score Model – Bottom Using vertical and horizontal line segments Connect each bottom point of the vertical line segments as a “bottom” wall-floor boundary
Score Model – Bottom Using vertical and horizontal line segments Connect each bottom point of the vertical line segments as a “bottom” wall-floor boundary Compute the distance of each horizontal lines segments to the “bottom” wall-floor boundary (red circled horizontal line segments indicates a positive contribution)
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Score Model – Homogeneous Using efficient graph-based segmentation ( Felzenszwalb [5]), we may get a bigger segmented area in floor area, due to decorations, posters, windows etc. on the wall. Compute the ratio of area of the segmented region below a horizontal line segment over the biggest segmented region in the image. The ratio is assigned to each horizontal line segment as a homogenous score.
Detecting wall-floor boundary Given a threshold to the sum of each score Connect the remaining line segments and extend the endpoints to the edges of the image Future work: A larger database and AdaBoost algorithm to generate weights for each score
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Evaluation Criterion • Wall- floor Boundary • Green line: Detected wall-floor boundary • Red line: Ground truth
Evaluation Criterion • Wall- floor Boundary • Green line: Detected wall-floor boundary • Red line: Ground truth • Area • Blue shade area: misclassified area • Red shade area: ground truth floor area • Error Rate
Sample Results Corridor images from our database
Sample Results Images download from internet.
Sample Results Lee’s Original Image Ours Some successful results of failure examples from Lee[1].
Sample Results Texture wall Checked floor Overly dark Bright lights Failure examples
Sample Results Video clip 1
Sample Results Video clip 2
Outline • Previous work • Detecting Line Segments • Score model for Evaluating Line Segments • Structure Score • Bottom Score • Homogenous Score • Experimental Results • Conclusion
Conclusion • Summaries • Over 90% of the corridor images in our database can be correctly detected. • Speed: around 7 frame/sec. • Weakness: not robust to highly textured floor, low resolution and dark environment. • Future work • Speed up the current algorithm • Improving score model by add more visual cues • Mapping the whole corridor structure for robot navigation • …
Acknowledgement • Clemson Computer Vision Group reviewers • Zhichao Chen • Vidya Murali • Anonymous reviewers