Advancements in Grasping Experimentation and Motion Capture for Improved Finger Tracking
Our current work involves trial grasping experiments with John using markers and MATLAB for finger movement tracking. We determine camera configurations for accuracy and mount cameras to truss. Next steps include assisting John, assembling truss with cameras, documenting motion capture system, building experiment database, and reviewing grasping notes.

Advancements in Grasping Experimentation and Motion Capture for Improved Finger Tracking
E N D
Presentation Transcript
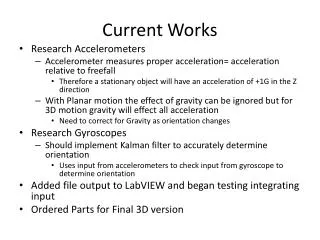
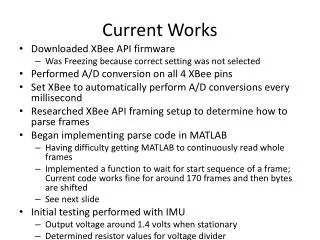
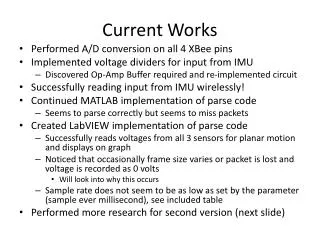
Current Works • Performed several trial grasping experiments with John (using a black glove with 3M tape as markers) • Determined best way to track finger movements during grasp is by using MATLAB to parse direct marker locations (not using “trackable” objects) • Created code to be used with John’s parsing algorithm that will stream marker locations in real time to MATLAB • Tried several different camera configurations to determine what arrangements should work best • Ran experiments to determine system accuracy • Seems to vary depending on the location of the object in relation to the cameras • Mounted cameras to truss
Whats next? • Continue assisting John as needed • Assembling Truss and mounting cameras • Performing grasping experiments • Document motion capture system in Lab Wiki • Build a database containing all experiment data • Review grasping notes/complete assignments