Multiresolution stereo image matching using complex wavelets
Multiresolution stereo image matching using complex wavelets. Julian Magarey CRC for Sensor Signal and Information Processing. Anthony Dick Dept of Computer Science University of Adelaide. Stereo Vision Problem. A Stereo Pair. AIM: To recover 3D shape from stereo pair. Stereo Matching.

Multiresolution stereo image matching using complex wavelets
E N D
Presentation Transcript
Multiresolution stereo image matching using complex wavelets Julian Magarey CRC for Sensor Signal and Information Processing Anthony Dick Dept of Computer Science University of Adelaide
A Stereo Pair AIM: To recover 3D shape from stereo pair
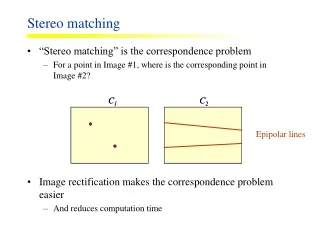
Stereo Matching • Find a point in each image which represents the same point in the scene • corresponding points corresponding points disparity
Feature Based Matching • Detect and match distinctive features • Problems • featureless areas • occluded features • same feature may appear different
Multiresolution Matching • Match points at several levels of detail Left Image MATCH MATCH MATCH FINE COARSE Right Image
Wavelet Transform Original Image Resolution i,j Level 1 Res i/2, j/2 Level 2 Res i/4, j/4
Multiresolution Matching • Now have multiresolution representation • Level m similarity distance measure: where x is a pixel in the level m representation of the left image x’ is a pixel in the level m representation of the right image
Similarity distance surface • Can extrapolate similarity surface about x’ where the surface minimum, the location of the surface minimum, a 2x2 curvature matrix, are derived from
Stereo Matching Algorithm • Now have basic matching algorithm • perform wavelet transform on images • minimise SD(x,x’) for all x at top level • use as starting point for finer level matching • What if top level match is wrong? • How do we interpolate matches to finer level?
Coping with Mismatches • Find a field of disparity vectors which minimises where is a directed measure of the difference between {u} and the unsmoothed disparity field is a measure of the uniformity of {u} is a scalar controlling their relative influence
Regularisation Features • Based on Anandan [IJCV, 1989] • Use curvature matrix κ to smooth more in directions of less certainty Smooth more in this direction Smooth less in this direction Similarity surface contours
Coarse-to-fine interpolation • Robust disparity interpolation A B a b c d C D = level m pixel = level m+1 pixel D(a) = choice of {D(A), D(B), D(C), D(D)} which minimises similarity distance
Results • Calibrated camera setup • Projective reconstruction • Form textured VRML surface 3D Surface C1 C2 Right Camera Left Camera
Conclusion • Future work • lighting • geometric constraint incorporation • colour images • camera self-calibration • more than two images • Already, results are promising!