Download
1 / 14
150 likes | 376 Vues
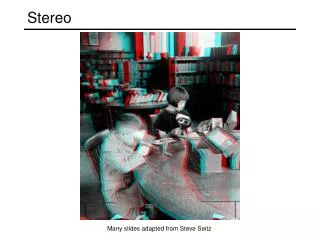
Stereoscopic Inpainting: Joint Color and Depth Completion from Stereo Images. Liang Wangy Hailin Jinz Ruigang Yangy Minglun Gongx Center for Visualization and Virtual Environments, University of Kentucky, USA Advanced Technology Labs, Adobe Systems Incorporated, USA

E N D
Stereoscopic Inpainting: Joint Color and Depth Completion from Stereo Images Liang WangyHailinJinzRuigangYangyMinglunGongx Center for Visualization and Virtual Environments, University of Kentucky, USA Advanced Technology Labs, Adobe Systems Incorporated, USA Computer Science Department, Memorial University of Newfoundland, Canada Reporter: Annie Lin • Advisor: prof. Huei-Yung Lin • Date : 2009/12/15
outline • Takes stereo images and estimated disparity maps as input and fills in missing color and depthinformation introduced by occlusions or objectremoval • Introduction • Segmentation-based occlusion filling • Foreground object removal • Mutual completion through warping • Iterative texture synthesis • Experimental results and conclusions
Introduction • Inpainting: completing bothtextureand depth of a stereo image pair after object removal Mutual completion through warping Segmentation-based occlusion filling Foreground object removal Iterative texture synthesis Input output 2 images 2 disparity maps 2 occlusion maps
[18] symmetric stereo matching for occlusion handling (estimate disparity and occlusion maps)
Segmentation-based occlusion filling • Plane fitting for (partly) visible segments. • Plane assignment for the remaining segments. • Matching cost 0 => s&t adjacent 1 => Otherwise Color similarity Ratio of pixels in t that violate the weak consistency
Mutual completion through warping • mutually complete each other through 3D warping [16]
Iterative texture synthesis(Inpainting ) • The remaining pixels in are the parts of uncovered background that areinvisiblein both stereo images. • An iterative process is used in this paper for filling these pixels. • [5] Object Removal by Exemplar-Based Inpainting SSD
Consistency check. • For most image completion approaches there is no decent way to detect visual artifacts since the result is considered as optimal by the algorithm • This paper -> inpainting for left and right images or disparity maps -> independently • unreliableinpainted results can be detected based on color consistency of corresponding pixels.