Download
1 / 21
210 likes | 417 Vues
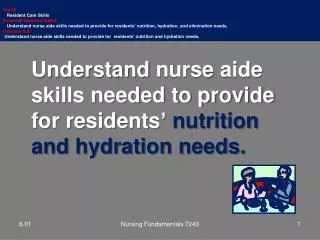
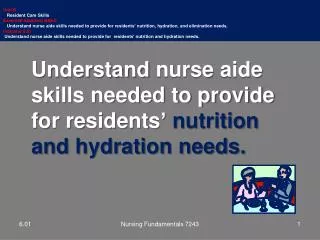
Commande d’actionneurs à l’aide d’un microprocesseur. 1 Prise en main du DSP Christian Koechli. Mesure. Capteurs. Composants de l’électronique de commande. CPU: DSP ou m contrôleur. Signaux de mesure. Signaux logiques. Driver. Alim. de la « logique ». Signaux de commande.

E N D
Commande d’actionneurs à l’aide d’un microprocesseur 1 Prise en main du DSP Christian Koechli
Mesure Capteurs Composants de l’électronique de commande CPU: DSP ou mcontrôleur Signaux de mesure Signaux logiques Driver Alim. de la « logique » Signaux de commande Alim puissance
Texas Instruments TMS320F28069 • Processeur 32 bits • Architecture Harvard • F=90MHz (80 protos) • FPU / CLA • 256 kB flash • 100 kB RAM • 1 AD (16 canaux 12 bits 3MSps) • SPI/I2C/CAN/USB • 2 RS232 • 54 GPIO • 3 CAPTURE +4 HRCap+ 2eQep • 8 ePWM
Exemple de programmation extern volatile struct GPIO_CTRL_REGS GpioCtrlRegs; extern volatile struct GPIO_DATA_REGS GpioDataRegs; struct GPIO_CTRL_REGS { union GPACTRL_REG GPACTRL; // GPIO A Control Register (GPIO0 to 31) union GPA1_REG GPAQSEL1; // GPIO A Qualifier Select 1 Register (GPIO0 to 15) union GPA2_REG GPAQSEL2; // GPIO A Qualifier Select 2 Register (GPIO16 to 31) union GPA1_REG GPAMUX1; // GPIO A Mux 1 Register (GPIO0 to 15) union GPA2_REG GPAMUX2; // GPIO A Mux 2 Register (GPIO16 to 31) union GPADAT_REG GPADIR; // GPIO A Direction Register (GPIO0 to 31) union GPADAT_REG GPAPUD; // GPIO A Pull Up Disable Register (GPIO0 to 31) Uint32 rsvd1; // reserved union GPBCTRL_REG GPBCTRL; // GPIO B Control Register (GPIO32 to 63) union GPB1_REG GPBQSEL1; // GPIO B Qualifier Select 1 Register (GPIO32 to 47) union GPB2_REG GPBQSEL2; // GPIO B Qualifier Select 2 Register (GPIO48 to 63) union GPB1_REG GPBMUX1; // GPIO B Mux 1 Register (GPIO32 to 47) union GPB2_REG GPBMUX2; // GPIO B Mux 2 Register (GPIO48 to 63) union GPBDAT_REG GPBDIR; // GPIO B Direction Register (GPIO32 to 63) union GPBPUD_REG GPBPUD; // GPIO B Pull Up Disable Register (GPIO32 to 63) Uint16 rsvd2[24];// reserved union AIO_REG AIOMUX1; // Analog IO Mux 1 Register (AIO0 to 15) Uint32 rsvd3; // reserved union AIODAT_REG AIODIR; // Analog IO Direction Register (AIO0 to 15) Uint16 rsvd4[5]; // reserved };
Exemple de programmation struct GPIO_DATA_REGS { union GPADAT_REG GPADAT; // GPIO Data Register (GPIO0 to 31) union GPADAT_REG GPASET; // GPIO Data Set Register (GPIO0 to 31) union GPADAT_REG GPACLEAR; // GPIO Data Clear Register (GPIO0 to 31) union GPADAT_REG GPATOGGLE; // GPIO Data Toggle Register (GPIO0 to 31) union GPBPUD_REG GPBDAT; // GPIO Data Register (GPIO32 to 63) union GPBDAT_REG GPBSET; // GPIO Data Set Register (GPIO32 to 63) union GPBDAT_REG GPBCLEAR; // GPIO Data Clear Register (GPIO32 to 63) union GPBDAT_REG GPBTOGGLE; // GPIO Data Toggle Register (GPIO32to 63) Uint16 rsvd1[8]; // reserved union AIODAT_REG AIODAT; // Analog IO Data Register (AIO0-15) Uint16 rsvd2; union AIODAT_REG AIOSET; // Analog IO Data Set Register (AIO0-15) Uint16 rsvd3; union AIODAT_REG AIOCLEAR; // Analog IO Data Clear Register (AIO0-15) Uint16 rsvd4; union AIODAT_REG AIOTOGGLE; // Analog IO Data Toggle Register (AIO0-15) Uint16 rsvd5; }; Au reset toutes les pates sont configurées comme IO/input. Pour configurer la patte EPWM1A comme périphérique EPWM : EALLOW; GpioCtrlRegs.GPAMUX1.bit.GPIO0=1 ; EDIS;
(IER) “Switch” (INTM) “Global Switch” (IFR) “Latch” Core Interrupt 1 INT1 C28x Core 0 INT2 1 INT14 Maskable Interrupt Processing Conceptual Core Overview • A valid signal on a specific interrupt line causes the latch to display a “1” in the appropriate bit • If the individual and global switches are turned “on” the interrupt reaches the core
11 14 13 12 10 15 9 8 RTOSINT DLOGINT INT14 INT13 INT12 INT11 INT10 INT9 6 5 4 2 7 1 3 0 INT8 INT7 INT6 INT5 INT4 INT3 INT2 INT1 /*** Manual setting/clearing IFR ***/ extern cregister volatile unsigned int IFR; IFR |= 0x0008; //set INT4 in IFR IFR &= 0xFFF7; //clear INT4 in IFR Interrupt Flag Register (IFR) Pending : IFR Bit = 1 Absent : IFR Bit = 0 • Compiler generates atomic instructions (non-interruptible) for setting/clearing IFR • If interrupt occurs when writing IFR, interrupt has priority • IFR(bit) cleared when interrupt is acknowledged by CPU • Register cleared on reset
11 14 13 12 10 15 9 8 RTOSINT DLOGINT INT14 INT13 INT12 INT11 INT10 INT9 6 5 4 2 7 1 3 0 INT8 INT7 INT6 INT5 INT4 INT3 INT2 INT1 /*** Interrupt Enable Register ***/ extern cregister volatile unsigned int IER; IER |= 0x0008; //enable INT4 in IER IER &= 0xFFF7; //disable INT4 in IER Interrupt Enable Register (IER) Enable: Set IER Bit = 1 Disable: Clear IER Bit = 0 • Compiler generates atomic instructions (non-interruptible) for setting/clearing IER • Register cleared on reset
Bit 0 INTM ST1 /*** Global Interrupts ***/ asm(“ CLRC INTM”); //enable global interrupts asm(“ SETC INTM”); //disable global interrupts Interrupt Global Mask Bit • INTM used to globally enable/disable interrupts: • Enable: INTM = 0 • Disable: INTM = 1 (reset value) • INTM modified from assembly code only: