Download
1 / 19
190 likes | 278 Vues
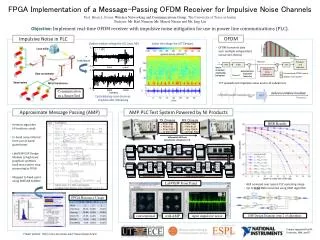
This project aims to simulate and compare error rate performance of single and multiuser receivers for downlink OFDM with training. The goal is to identify a receiver structure with excellent performance, limited training, complexity, and variable degrees of freedom. The study assumes a downlink channel, OFDM modulation, binary symbols, dual-antenna handset, Rayleigh fading, and separate spatial filters for each channel. The system model involves received signal, transmitted bits, channel matrix, optimal filters with perfect feedback, linear MMSE receiver, and more. Results show that the DFD receiver outperforms conventional MMSE with perfect channel knowledge. Different training methods and pilot symbol knowledge impact receiver performance significantly.

E N D
Receiver Performance for Downlink OFDM with Training Koushik Sil ECE 463: Adaptive Filter Project Presentation
Goal of this Project • Simulate and compare the error rate performance of single- and multiuser receivers for the OFDM downlink with training. • Identify a receiver structure, which has excellent performance with limited training, complexity, and variable degrees of freedom.
Assumptions • Downlink channel • Modulation scheme: OFDM • Binary symbols • 2 users on cell boundary (worst case scenario) • Dual-antenna handset • Block (i.i.d.) Rayleigh fading • Separate spatial filter for each channel • Training interval followed by data transmission
System Model For fixed subchannel: • ri = received signal at antenna i • bk = transmitted bit for user k r1 = h11b1 + h12b2 + n1 r2 = h21b1 + h22b2 + n2 • M = # of antennasN = # of channelsK = # of users
System Model (contd..) In matrix form, for one subchannel, r1 h11 h12 b1 = + n r2 h21 h22 b2 For all subchannels, we model H as block diagonal matrix: r11 h111 h121 b11 r21 h211 h221 b21 r12 h112 h122 b12 r22 = h212 h222 b22 + n . . . . . . r1N b1N r2N b2N Received covariance matrix: R = E{rrt} = HHt + 2I
Single User Matched Filter r11 h111 b11 r21 h211 r12 h112 b12 r22 = h212 + n . . . . r1N r2N b1N r = hb + n where h is MNN channel matrix, and M is the number of antennas (2 in our case) best = sign(htr)
Maximum-Likelihood Receiver • Choose b 2 SML = {(1,1),(1,-1),(-1,1), (-1,-1)} to minimize L(b) = || Hb – r ||2 • Decoding rule: best = arg minb 2 SML ||Hb – r ||2
Linear MMSE Receiver • MSE = E[|b – best(r)|2], best = Flintr • where Flin = R-1H • Decoding rule: best = (R-1H)tr
DFD: Optimal Filters with Perfect Feedback • Assume perfect feedback: best = b(to compute F and B) • Input to the decision device for each channel: x = Ftr – Btbest where, F: MK feedforward matrix best: K1 estimated bits B: KK feedback filter • Error at DFD output: edfd = b – x • Error covariance matrix: ξdfd = E[edfd edfdt] • Minimizing tr[ξdfd] gives F = R-1H (I + B) I + B = (HtH + 2I)(|A|2 + 2I)-1 where A is the matrix of received amplitudes
DFD: Single Iteration • Initial bit estimates for feedback are obtained from linear MMSE filter • Given refined estimate best, can iterate. • Numerical results assume a single iteration.
Optimal Soft Decision Device • Minimimze MSE = • Solution:
Training Performance: Direct Filter Estimation • Assumption: both users demodulate both pilots • Cost function = where • Solution: where T is the training length
Training Performance: Least Square Channel Estimation • Minimize the objective function • Minimizing objective functionw.r.t. , we get
Partial Knowledge of Pilots • The pilot from the interfering BST may not be available.
Performance Comparison: Partial Knowledge of Pilots Single pilot leads to performance with full channel knowledge. Here we need both pilots to achieve performance with full channel knowledge.
Conclusions • DFD (both hard and soft) performs significantly better than conventional linear MMSE receiver with perfect channel knowledge. • Two different types of training have been considered: • Direct filter coefficient estimation • Least square channel estimation • Both have almost identical performance when pilot symbols for both users are available • Knowledge of the interfering pilot can give substantial gains (plots show around 4 dB)