Interfacing Processor and Peripherals
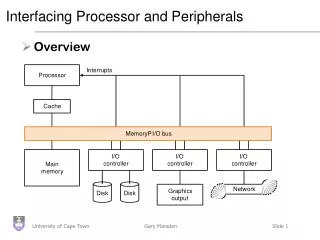
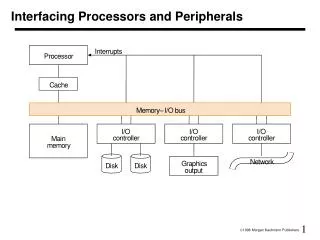
Interfacing Processor and Peripherals. Overview. Introduction. I/O often viewed as second class to processor design Processor research is cleaner System performance given in terms of processor Courses often ignore peripherals Writing device drivers is not fun

Interfacing Processor and Peripherals
E N D
Presentation Transcript
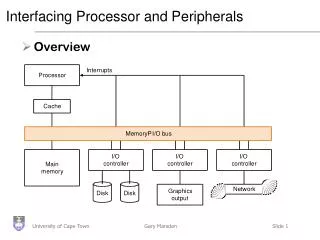
Interfacing Processor and Peripherals • Overview
Introduction • I/O often viewed as second class to processor design • Processor research is cleaner • System performance given in terms of processor • Courses often ignore peripherals • Writing device drivers is not fun • This is crazy - a computer with no I/O is pointless
Peripheral design • As with processors, characteristics of I/O driven by technology advances • E.g. properties of disk drives affect how they should be connected to the processor • PCs and super computers now share the same architectures, so I/O can make all the difference • Different requirements from processors • Performance • Expandability • Resilience
Peripheral performance • Harder to measure than for the processor • Device characteristics • Latency / Throughput • Connection between system and device • Memory hierarchy • Operating System • Assume 100 secs to execute a benchmark • 90 secs CPU and 10 secs I/O • If processors get 50% faster per year for the next 5 years, what is the impacr
Relative performance • CPU time + IO time = total time (% of IO time) • Year 0: 90 + 10 = 100 (10%) • Year 1: 60 + 10 = 70 (14%) • : • Year 5: 12 + 10 = 22 (45%) • !
IO bandwidth • Measured in 2 ways depending on application • How much data can we move through the system in a given time • Important for supercomputers with large amounts of data for, say, weather prediction • How many IO operations can we do in a given time • ATM is small amount of data but need to be handled rapidly • So comparison is hard. Generally • Response time lowered by handling early • Throughput increased by handling multiple requests together
I/O Performance Measures • Look at some examples from the world of disks: all sorts of factors and uses • Different examples of performance benchmarks for different applications: • Supercomputers • I/O dominated by access to large files • Batch jobs of several hours • Large read followed by many writes (snapshots in case process fails) • Main measure: throughput
More Measures • Transaction processing (TP) • TP Involves both a response time requirement and a level of throughput performance • Most accesses are small, so chiefly concerned with I/O rate (# disk accesses / second) as opposed to data rate (bytes of data per second) • Usually related to databases: graceful failure required, and reliability essential • Benchmark: TPC-C • 128 pages long • Measures T/s • Includes other system elements (e.g. terminals)
File system I/O benchmarks • File systems stored on disk have different access patterns (each OS stores files differently) • Can ‘profile’ accesses to create synthetic file system benchmarks • E.g. for unix in an engineering environment: • 80% of accesses to files < 100k • 90% of accesses to sequential addresses • 67% reads • 27% writes • 6% read-modify-write
Typical File benchmark • 5 phases using 70 files, totalling 200k • Make dir • Copy • Scan Dir (recursive for all attributes) • Read all • Make
Device Types and characteristics • Key characteristics • Behaviour: Input / Output / Storage (read & write) • Partner: Human / Machine • Data rate: Peak data transfer rate
Mouse • Communicates with • Pulses from LED • Increment / decrement counters • Mice have at least 1 button • Need click and hold • Movement is smooth, slower than processor • Polling • No submarining • Software configuration
Hard disk • Rotating rigid platters with magnetic surfaces • Data read/written via head on armature • Think record player • Storage is non-volatile • Surface divided into tracks • Several thousand concentric circles • Track divided in sectors • 128 or so sectors per track
Access time • Three parts • Perform a seek to position arm over correct track • Wait until desired sector passes under head. Called rotational latency or delay • Transfer time to read information off disk • Usually a sector at a time at 2~4 Mb / sec • Control is handled by a disk controller, which can add its own delays.
Calculating time • Seek time: • Measure max and divide by two • More formally: (sum of all possible seeks)/number of possible seeks • Latency time: • Average of complete spin • 0.5 rotations / spin speed (3600~5400 rpm) • 0.5/ 3600 / 60 • 0.00083 secs • 8.3 ms
More faking • Disk drive hides internal optimisations from external world
Networks • Currently very important • Factors • Distance: 0.01m to 10 000 km • Speed: 0.001 Mb/sec to 1Gb/sec • Topology: Bus, ring, star, tree • Shared lines: None (point to point) or shared (multidrop)
Example 1: RS-232 • For very simple terminal networks • From olden times when 80x24 text terminals connected to mainframes over dedicated lines • 0.3 to 19.2 Kbps • Point to point, star • 10 to 100m
Example 2: Ethernet LAN • 10 - 100 Mbps • One wire bus with no central control • Multiple masters • Only one sender at a time which limits bandwidth but ok as utilisation is low • Messages or packets are sent in blocks of 64 bytes (0.1 ms to send) to 1518 bytes (1.5 ms) • Listen, start, collision detection, backoff
Example 3: WAN ARPANET • 10 to n thousand km • ARPANET first and most famous WAN (56 Kbps) • Point to point dedicated lines • Host computer communicated with interface message processor (IMP) • IMPs used the phone lines to communicate • IMPs packetised messages into 1Kbit chunks • Packet switched delivery (store and forward) • Packets reassembled at receiving IMP
Some thoughts • Currently 100 Mbps over copper is common and we have Gbps technology in place • This is fast! • We need systems than process data as quickly as it arrives • Hard to know where the bottlenecks lie • Network at UCT has / will have Gigabit backplane • Our international connection is only 10 Mbps
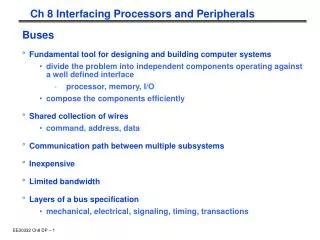
Buses: Connecting I/O devices • Interfacing subsystems in a computer system is commonly done with a bus: “a shared communication link, which uses one set of wires to connect multiple sub-systems”
Why a bus? • Main benefits: • Versatility: new devices easily added • Low cost: reusing a single set of wires many ways • Problems: • Creates a bottleneck • Tries to be all things to all subsystems • Comprised of • Control lines: signal requests, acknowledgements and to show what type of information is on the • Data lines:data, destination / source address
Controlling a bus • As the bus is shared, need a protocol to manage usage • Bus transaction consists of • Sending the address • Sending / receiving the data • Note than in buses, we talk about what the bus does to memory • During a read, a bus will ‘receive’ data
Types of Bus • Processor-memory bus • Short and high speed • Matched to memory system (usually Proprietary) • I/O buses • Lengthy, • Connected to a wide range of devices • Usually connected to the processor using 1 or 3 • Backplane bus • Processors, memory and devices on single bus • Has to balance proc-memory with I/O-memory • Usually requires extra logic to do this
Synchronous and Asynchronous buses • Synchronous bus has a clock attached to the control lines and a fixed protocol for communicating that is relative to the pulse • Advantages • Easy to implement (CC1 read, CC5 return value) • Requires little logic (FSM to specify) • Disadvantages • All devices must run at same rate • If fast, cannot be long due to clock skew • Most proc-mem buses are clocked
Asynchronous buses • No clock, so it can accommodate a variety of devices (no clock = no skew) • Needs a handshaking protocol to coordinate different devices • Agreed steps to progress through by sender and receiver • Harder to implement - needs more control lines
Increasing bus bandwidth • Key factors • Data bus width: Wider = fewer cycles for transfer • Separate vs Multiplexed, data and address lines • Separating allows transfer in one bus cycle • Block transfer: Transfer multiple blocks of data in consecutive cycles without resending addresses and control signals etc.
Obtaining bus access • Need one, or more, bus masters to prevent chaos • Processor is always a bus master as it needs to access memory • Memory is always a slave • Simplest system as a single master (CPU) • Problems • Every transfer needs CPU time • As peripherals become smarter, this is a waste of time • But, multiple masters can cause problems
Bus Arbitration • Deciding which master gets to go next • Master issues ‘bus request’ and awaits ‘granted’ • Two key properties • Bus priority (highest first) • Bus fairness (even the lowest get a go, eventually) • Arbitration is an overhead, so good to reduce it • Dedicated lines, grant lines, release lines etc.
Different arbitration schemes • Daisy chain: Bus grant line runs through devices from highest to lowest • Very simple, but cannot guarantee fairness
Centralised Arbitration • Centralised, parallel: All devices have separate connections to the bus arbiter • This is how the PCI backplane bus works (found in most PCs) • Can guarantee fairness • Arbiter can become congested
Distributed • Distributed arbitration by self selection: • Each device contains information about relative importance • A device places its ID on the bus when it wants access • If there is a conflict, the lower priority devices back down • Requires separate lines and complex devices • Used on the Macintosh II series (NuBus)
Collision detection • Distributed arbitration by collision detection: • Basically ethernet • Everyone tries to grab the bus at once • If there is a ‘collision’ everyone backs off a random amount of time
Bus standards • To ensure machine expansion and peripheral re-use, there are various standard buses • IBM PC-AT bus (de-facto standard) • SCSI (needs controller) • PCI (Started as Intel, now IEEE) • Ethernet • Bus bandwidth depends on size of transfer and memory speed
Giving commands to I/O devices • Processor must be able to address a device • Memory mapping: portions of memory are allocated to a device (Base address on a PC) • Different addresses in the space mean different things • Could be a read, write or device status address • Special instructions: Machine code for specific devices • Not a good idea generally
Communicating with the Processor • Polling • Process of periodically checking the status bits to see if it is time for the next I/O operation • Simplest way for device to communicate (via a shared status register • Mouse • Wasteful of processor time
Interrupts • Notify processor when a device needs attention (IRQ lines on a PC) • Just like exceptions, except for • Interrupt is asynchronous with program execution • Control unit only checks I/O interrupt at the start of each instruction execution • Need further information, such as the identity of the device that caused the interrupt and its priority • Remember the Cause Register?
Transferring Data Between Device and Memory • We can do this with Interrupts and Polling • Works best with low bandwidth devices and keeping cost of controller and interface • Burden lies with the processor • For high bandwidth devices, we don’t want the processor worrying about every single block • Need a scheme for high bandwidth autonomous transfers
Direct Memory Access (DMA) • Mechanism for offloading the processor and having the device controller transfer data directly • Still uses interrupt mechanism, but only to communicate completion of transfer or error • Requires dedicated controller to conduct the transfer