Download
1 / 15
170 likes | 329 Vues
This research focuses on developing an innovative motion planner for robotic arms tasked with manipulating Deformable Linear Objects (DLOs), such as ropes and surgical sutures. By addressing the challenges in tying complex knots, including self-knots and various common knots, this work aims to enhance robotic manipulation capabilities in various applications like automated surgery and humanoid assistance. The approach integrates a topological path planner utilizing Probabilistic Road Maps (PRMs) to ensure collision-free motions while achieving desired configurations, pushing the boundaries of robotics.

E N D
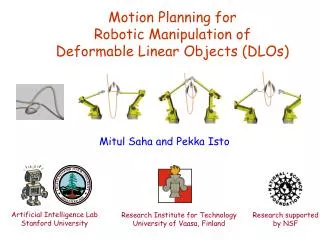
Motion Planning for Robotic Manipulation of Deformable Linear Objects (DLOs) Mitul Saha, Pekka Isto, and Jean-Claude Latombe Research supported by NSF, ABB and GM Artificial Intelligence Lab Stanford University
Objective and Motivation • Develop a motion planner to aid robot arms perform complex tasks with Deformable Linear Objects (DLOs) like tieing self-knots and knots around objects. • Examples of DLO are ropes, strings, surgical sutures, cables etc. Bowline knot Sailing knot Figure-8 knot Surgeon’s knot Manual knot tying Robotic knot tying
Objective and Motivation • Push the state of the art in robotic manipulation • Manipulating DLOs is perhaps one of the most challenging tasks in robotics • Possible Impact/Applications • Could open many new domains for robotics application • Enhance manipulation skills of Humanoids assisting humans in their common life activities • Automated surgery
The Manipulation Problem • Defining goal configurations • Topological goal vs geometric goal - This leads to the development of a topological path planner Geometrically different but topologically same: Bowline knot
The Manipulation Problem • Defining goal configurations - Topological goal (aka “Crossing Configuration”) is defined with respect to a reference plane Planar projection of the DLO central axis DLO Crossings Crossing Configuration: (C1, C2, C3, C4): ((1,-6)-, (-2,5)-, (3,-8)-, (-4,7)-)
- Reduced alternating Alternating with embedded slip loops The Manipulation Problem • We focus on two types of common knots: under over over Crossing Configuration: ((1,-6)-, (-2,5)-, (3,-8)-, (-4,7)-)
The problem: • Start from unwound (State-0) DLO configuration and achieve a configuration and achieve a configuration with desired topology • Given: • Physics of the DLO as a state function f • Manipulator arms A final configuration with desired topology Starting configuration DLO
Our Planning Approach - Manipulation using 2 cooperating robot arms - Use of static sliding supports (“tri-fingers”) to provide structural support
Defining “Forming Sequence” • Knots can be tied, state-by-state, in the order defined by their “forming sequence” Forming Sequence: C2, C1, C4, C3 A substate
Defining “hierarchy of components” The curves in red are “curve-pieces”: c12, c23, c34, c45, c56, c67, c78. The component Co is bounded by {c12, c56}. I II I II I II I-a III III I-b
“Hierarchy of components” is used to determine where to place static sliding supports (“tri-fingers”)
Our “topological” motion planner is based on Probabilistic RoadMaps (PRMs) -Knot is tied state by state using the “forming sequence” Forming Sequence: C2, C1, C4, C3
Our “topological” motion planner is based on Probabilistic RoadMaps (PRMs) DLO Need to find collision free robot motion that produces u, the small random move of the grasped point Sample a new DLO configuration by randomly perturbing the grasped point of an existing configuration Robot A Robot A dQ = J+u + (I - J+J) dq u: motion of grasp J : Jacobian J+: right psuedo-inverse ofJ dq: small random robot motion dQ: robot motion producingu Grasping robot fails DLO Robot B Robot B
Our “topological” motion planner is based on Probabilistic RoadMaps (PRMs) • Use the “hierarchy of components” to determine when to place • static sliding supports (“tri-fingers”)