Efficient Nearest Neighbor Queries with R-tree Based on Notes from NTUA
250 likes | 334 Vues
Learn about Nearest Neighbor Queries using R-trees, including finding the nearest object to a query point, k-nearest neighbors, and Best-First algorithm. Analyze search regions, distance computations, and optimization techniques for NN search in R-trees.

Efficient Nearest Neighbor Queries with R-tree Based on Notes from NTUA
E N D
Presentation Transcript
Nearest Neighbor Queries using R-trees Based on notes from NTUA
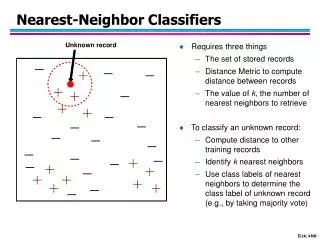
Nearest Neighbor Search • Find the object nearest to a query point q • E.g., find the gas station nearest to the red point. • k nearest neighbors: Find the k objects nearest to q • E.g., 1 NN = {h}, 2NN = {h, a}, 3NN = {h, a, i}
P1 P3 I C A G H F B J q E P4 P2 D R-trees - NN search
R-trees - NN search P1 P3 I C A G H F B J E P4 q P2 D
K-NN search • Keep the sorted buffer of at most k current nearest neighbors • Pruning is done using the k-th distance
NN search: Best-First • Global order [HjaltasonSamet99] • Maintain distance to all entries in a common Priority Queue • Use only MINDIST • Repeat • Inspect the next MBR in the list • Add the children to the list and reorder • Until all remaining MBRs can be pruned
2 Nearest Neighbor Search (NN) with R-Trees • Best-first (BF) algorihm: y axis Root E 10 E 7 E E 3 1 2 E E e f 1 2 8 1 2 8 E E 8 E 2 g E d 1 5 6 i E E E E E E h E E 8 7 9 9 5 6 6 4 query point 2 13 17 5 9 contents 5 4 omitted E 4 search b a region i f h g e a c d 2 b c E 3 5 2 10 13 13 10 13 18 13 x axis E E E 10 0 8 8 2 4 6 4 5 Action Heap Result {empty} Visit Root E E E 1 2 8 1 2 3 E follow E E E {empty} E E 5 5 8 1 9 4 5 3 2 6 2 E E follow E E E E {empty} E E 17 13 5 5 8 2 9 9 7 4 5 3 2 6 8 E follow E E E E E {(h, )} E 17 13 8 5 8 9 5 9 7 4 5 3 6 g E i E E E E 13 10 5 8 7 5 9 4 5 3 13 6 Report h and terminate
HS algorithm Initialize PQ (priority queue) InsertQueue(PQ, Root) While not IsEmpty(PQ) R= Dequeue(PQ) If R is an object Report R and exit (done!) If R is a leaf page node For each O in R, compute the Actual-Dists, InsertQueue(PQ, O) If R is an index node For each MBR C, compute MINDIST, insert into PQ
Analysis - Overview • Analyze the situation after finding the k nearest neighbors • Let o be the kth nearest neighbor of q, let r be the distance of o from q. • The region within distance r from q is called the search region. • Since we assume that q is a point, the search region is a circle (or a hypersphere in higher dimensions) with radius r. • All objects inside the search region have already been reported by the algorithm (as the next nearest object), while all nodes intersecting the search region have been examined and their contents put on the priority queue. • The contents of the priority queue are contained in nodes intersecting the boundary of the search region. • The algorithm does not access any nodes or objects that lie entirely outside the search region (i.e., that are farther from q than o is).
R-trees - NN search: Branch and Bound • Based on: [Roussopoulos+, sigmod95]: • At each node, priority queue, with promising MBRs, and their best and worst-case distance • main idea: Every face of any MBR contains at least one point of an actual spatial object!
MBR face property • MBR is a d-dimensional rectangle, which is the minimal rectangle that fully encloses (bounds) an object (or a set of objects) • MBR f.p.: Every face of the MBR contains at least one point of some object in the database
Search improvement • Visit an MBR (node) only when necessary • How to do pruning? Using MINDIST and MINMAXDIST
MINDIST • MINDIST(P, R) is the minimum distance between a point P and a rectangle R • If the point is inside R, then MINDIST=0 • If P is outside of R, MINDIST is the distance of P to the closest point of R (one point of the perimeter)
MINDIST computation • MINDIST(p,R) is the minimum distance between p and R with corner points l and u • the closest point in R is at least this distance away u=(u1, u2, …, ud) R u ri = li if pi < li = ui if pi > ui = pi otherwise p p MINDIST = 0 l p l=(l1, l2, …, ld)
MINMAXDIST • MINMAXDIST(P,R): for each dimension, find the closest face, compute the distance to the furthest point on this face and take the minimum of all these (d) distances • MINMAXDIST(P,R) is the smallest possible upper bound of distances from P to R • MINMAXDIST guarantees that there is at least one object in R with a distance to P smaller or equal to it.
MINDIST and MINMAXDIST • MINDIST(P, R) <= NN(P) <=MINMAXDIST(P,R) MINMAXDIST R1 R4 R3 MINDIST MINDIST MINMAXDIST MINDIST MINMAXDIST R2
Pruning in NN search • Downward pruning: An MBR R is discarded if there exists another R’ s.t. MINDIST(P,R)>MINMAXDIST(P,R’) • Downward pruning: An object O is discarded if there exists an R s.t. the Actual-Dist(P,O) > MINMAXDIST(P,R) • Upward pruning: An MBR R is discarded if an object O is found s.t. the MINDIST(P,R) > Actual-Dist(P,O)
Pruning 1 example • Downward pruning: An MBR R is discarded if there exists another R’ s.t. MINDIST(P,R)>MINMAXDIST(P,R’) R R’ MINDIST MINMAXDIST
Pruning 2 example • Downward pruning: An object O is discarded if there exists an R s.t. the Actual-Dist(P,O) > MINMAXDIST(P,R) R Actual-Dist O MINMAXDIST
Pruning 3 example • Upward pruning: An MBR R is discarded if an object O is found s.t. the MINDIST(P,R) > Actual-Dist(P,O) R MINDIST Actual-Dist O
Ordering Distance • MINDIST is an optimistic distance where MINMAXDIST is a pessimistic one. MINDIST P MINMAXDIST
NN-search Algorithm • Initialize the nearest distance as infinite distance • Traverse the tree depth-first starting from the root. At each Index node, sort all MBRs using an ordering metric and put them in an Active Branch List (ABL). • Apply pruning rules 1 and 2 to ABL • Visit the MBRs from the ABL following the order until it is empty • If Leaf node, compute actual distances, compare with the best NN so far, update if necessary. • At the return from the recursion, use pruning rule 3 • When the ABL is empty, the NN search returns.
Best-First vs Branch and Bound • Best-First is the “optimal” algorithm in the sense that it visits all the necessary nodes and nothing more! • But needs to store a large Priority Queue in main memory. If PQ becomes large, we have thrashing… • BB uses small Lists for each node. Also uses MINMAXDIST to prune some entries
References: • Branch and Bound NN search: N. Roussopoulos, S. Kelley, F. Vincent: Nearest Neighbor Queries. SIGMOD Conference 1995: 71-79 • Best First NN search: G.R. Hjaltason, H. Samet: Distance Browsing in Spatial Databases. ACM Trans. Database Syst. 24(2): 265-318 (1999)
Some follow up works • D. Park, H. Kim: An Enhanced Technique for k-Nearest Neighbor Queries with Non-Spatial Selection Predicates. In Multimedia Tools and Applications archive, Volume 19 , Issue 1 (January 2003), Pages: 79 – 103 • Ian De Felipe, Vagelis Hristidis, Naphtali Rishe. Keyword Search on Spatial Databases. IEEE ICDE 2008