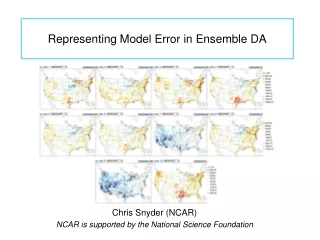
Representing Model Error in Ensemble DA
Representing Model Error in Ensemble DA. Chris Snyder (NCAR) NCAR is supported by the National Science Foundation. Representing Model Error in Ensemble DA. Results from: Soyoung Ha (NCAR) Judith Berner (NCAR) Josh Hacker (NPS). Introduction.

Representing Model Error in Ensemble DA
E N D
Presentation Transcript
Representing Model Error in Ensemble DA Chris Snyder (NCAR) NCAR is supported by the National Science Foundation
Representing Model Error in Ensemble DA Results from: Soyoung Ha (NCAR) Judith Berner (NCAR) Josh Hacker (NPS)
Introduction • Parameterized physical processes crucial at both meso- and convective scales • Model errors relatively more important than at synoptic and global scales • Meso- and convective-scale motions incompletely observed • E.g., lots of v obs but few of T at convective scale • DA scheme must use info from model dynamics to infer unobserved variables • DA scheme should therefore account for forecast-model errors
Introduction (cont.) • For ens. DA, natural to represent model error during forecast step • Multi-physics: Members uses distinct suites of physical parameterizations • Multi-parameter: Single physics suite, but parameters within parameterizations vary among members • Stochastic backscatter: Include noise in tendencies at each time step (iid!) • Can also represent in analysis step • Additive noise that depends on observations (Dowell and Wicker 2009) • Inflation of various flavors: “inflate” deviations of ensemble members about mean before assimilation
Introduction (cont.) • Here, focus on mesoscale aspects, esp. surface observations
Comparison of Model-Error Treatments in EF • Tests on CONUS domain • WRF/ARW, 45 km • Forecasts from GFS ensemble ICs every 3 days over 3 winter months • Evaluation against obs • Three schemes • Multi-physics. 10 distinct parameterization suites • Stochastic backscatter. Noise has spatially uniform variance • Limited multi-physics, multi-parameter (LMP2). 3 parameterization suites plus perturbations to one parameter in each of microphys, Cu, PBL, SW rad.
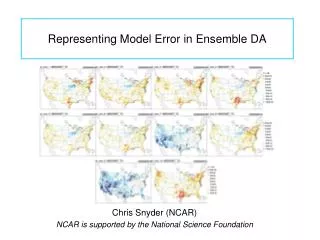
Comparison of Model-Error Treatments in EF • Stochastic backscatter better than multiphysics at 700 hPa; multiphysics better than backscatter near surface Difference in CRPS, 700 hPa T Difference in CRPS, 2-m T Courtesy Josh Hacker. See Hacker et al (2011), Berner et al (2011)
WRF/DART • Data Assimilation Research Testbed (DART) • Provides EnKF algorithm(s) • General framework, used for several other models • Parallelizes efficiently to 100’s of processors • See http://www.image.ucar.edu/DAReS/DART/ • WRF/ARW is forecast model • Suite of observation operators • Includes Doppler radar and various GPS; no radiances • Capable of assimilation on multiple, nested domains simultaneously
Assimilation of Surface Observations • Experimental design: • CONUS domain, 45-15 km nested configuration • 3-hourly analyses, with continuous cycling for June 2008 • Assimilate conventional obs and METAR observations • Evaluate against (independent) mesonet observations • Also tested “multiphysics” configuration • 10 different suites of physical parameterizations • EnKF details • 50 members • ~800-km localization • Adaptive inflation
Assimilation of Surface Observations (cont.) • Accounting for model error improves analyses and 3-h forecasts (NOT assimilated)
Adaptive Inflation • If forecast spread is too small, “inflate” ensemble deviations: • xi = (xi - E(x)) + E(x), • where dim() = dim(x), i.e. inflation for each state variable, spatially and temporally varying. (Anderson 2009) • Estimate with a Bayesian update: • p( | y) = p(y | ) p(). • Requires assumption that cor() = cor(x). • Accounts for numerous sources of uncertainties
Control physics Multi-physics Assimilation of Surface Observations (cont.) • Compensation between different model-error treatments • Need less inflation when using multi-physics ensemble
Which Approach? • Multi-physics and backscatter perform comparably for surface obs • Multiphysics: • Represents “structural” model error and differences among members are often differences in bias/climate • System is demanding to maintain as model and parameterizations evolve • V. v. demanding to improve all 10 suites • What to do in ensemble DA when members have different state variables? • Backscatter: • Represents random variations in grid-scale effects from sub-grid variability • Single model configuration, so easy to maintain and feasible to improve
Which Approach? • Multi-physics and backscatter perform comparably for surface obs • Multiphysics: • Represents “structural” model error and differences among members are often differences in bias/climate • System is demanding to maintain as model and parameterizations evolve • V. v. demanding to improve all 10 suites • What to do in ensemble DA when members have different state variables? • Backscatter: • Represents random variations in grid-scale effects from sub-grid variability • Single model configuration, so easy to maintain and feasible to improve • We favor backscatter at present.
Issues at the Convective Scale • Environment may be wrong because of model error/bias or because of random IC error at larger scale • Easy to conflate model error and larger-scale IC error • Crucial to consider extended periods or many cases • Where there is convective instability, expect error growth rates to increase rapidly as scale decreases • Backscatter may be especially effective • Backscatter for advected substances?
AFWA MEPS Ensemble Configurations AFWA’s Mesoscale Ensemble Prediction System (MEPS)
LMP2 Details • Perturbation magnitude chosen s.t. differences in forecast comparable to those • produced in previous perturbed-parameter experiments