Ensuring Absolute Stability in Controllable Feedback Systems via Quadratic Lyapunov Functions
This discussion focuses on the concept of absolute stability in controllable feedback systems using a quadratic common Lyapunov function that is strictly positive real (SPR). We explore how this framework simplifies to the SPR passivity criterion. Additionally, we address the limitations of the Popov criterion for feedback systems and the importance of the small-gain theorem. Key insights into the necessary and sufficient conditions for two-dimensional systems reveal a connection to worst-case switching and convex combinations of Hurwitz matrices. These insights have been known since the 1970s.

Ensuring Absolute Stability in Controllable Feedback Systems via Quadratic Lyapunov Functions
E N D
Presentation Transcript
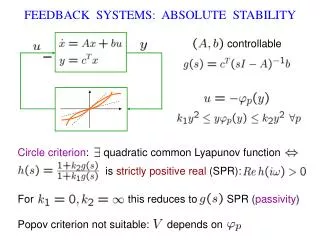
FEEDBACK SYSTEMS: ABSOLUTE STABILITY controllable Circle criterion: quadratic common Lyapunov function is strictly positive real (SPR): For this reduces to SPR (passivity) Popov criterion not suitable: depends on
FEEDBACK SYSTEMS: SMALL-GAIN THEOREM Small-gain theorem: quadratic common Lyapunov function controllable
TWO-DIMENSIONAL SYSTEMS Necessary and sufficient conditions for GUES known since 1970s worst-case switching quadratic common Lyap fcn <=> convex combinations of Hurwitz