TAIPAN Autonomous Underwater Vehicle
320 likes | 615 Vues
TAIPAN Autonomous Underwater Vehicle. Bruno Jouvencel Professor University of Montpellier Underwater robotics. OUTLINE. First part : our experience in AUV Second part : new prototype of AUV for MEDITATE project Third part: WP3. LIRMM - CNRS. Laboratory Computing science Robotics

TAIPAN Autonomous Underwater Vehicle
E N D
Presentation Transcript
TAIPANAutonomous Underwater Vehicle Bruno Jouvencel Professor University of Montpellier Underwater robotics Meditate
OUTLINE • First part : our experience in AUV • Second part : new prototype of AUV for MEDITATE project • Third part: WP3 Meditate
LIRMM - CNRS • Laboratory • Computing science • Robotics • Micro-electronics systems Staff 260 persons • Researchers 110 • Technical staff about 30 • About 120 invited researchers, postdoc, PhD students Meditate
Underwater Robotics TEAMfor MEDITATE • Bruno Jouvencel Professor • Olivier Strauss : Assistant Professor • Michel Benoit : Research Engineer • Jean Mathias Spiewak : PhD Student • Lionel Lapierre postdoc from september 2004 Meditate
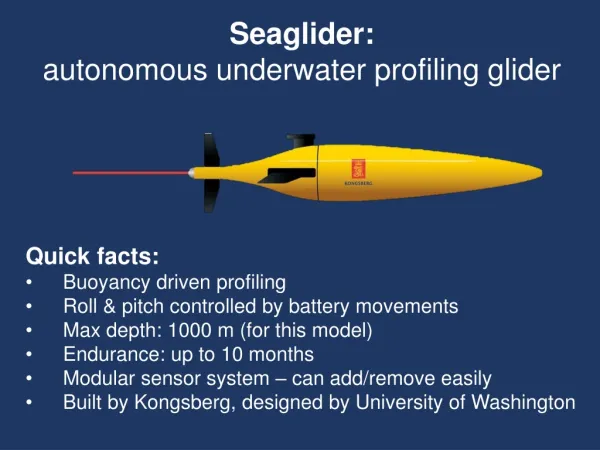
TAIPAN One Meditate
Video of TAIPAN Meditate
FIRST Scientific Mission • GOATS : Generic Oceanographic Array Technology System: (scientific program of NATO) • For TAIPAN: • First field deployment with a real scientific goal • Role : to provide the modelers with CTD data along trajectories in Biodola bay (Elba) Meditate
Scientific Sensors CTD sensor Positioning Transponder for Trackpoint 2 Meditate
Mission Interface Meditate
Vehicle Control Meditate
CTD Mapping with Taipan Meditate
3D Trajectory Meditate
Thau Lagoon : Spring LA-VISE Bathymetric measurements Real trajectories Meditate
Thau Lagoon LA-VISE Bathymetric measurements Real trajectories Meditate
Presentation of a new Autonomous Underwater Vehicle TAIPAN 2 Jean Mathias Spiewak PhD Student Meditate
Overview of AUV Taipan 2 Meditate
Topsolid view of Taipan 2 Meditate
Two onboard computers : navigation -- perception • Additional card dedicated to : A/D conversions, RS232 serial communications, logical I/Os and PWM signal generation Meditate
To compute displacement • three-axis inclinometer, • three-axis magnetometer, • yaw rate and pitch rate gyrometers and accelerometers • two pressure sensors, • loch doppler For dead reckoning Acoustical range meter GPS receiver For communication UHF radio link Wifi link Meditate
Scientific sensor payload • CTD sensor • Acoustical Doppler Current Profiler • Side Scan Sonar • CCD Camera • Acoustical sensors (obstacle avoidance) Meditate
CTD Sensor Meditate
Side Scan Sonar picture • La Vise fresh underwater spring : 30 meter depth • starboard and port side pictures Meditate
Work Package 3 Meditate
WP3 • Task A.1. Define the pay-load of vehicle. • Selection of sensors (Conductivity Temperature Depth, loch, sonar, doppler, GPS…) • the determination of the best positioning of sensors according the desired precision on measurements. Meditate
WP3 • Task A.2. Performances of the AUV. • Error on the trajectory of the vehicle, • The energy autonomy, • And so on. • Task A.3. Protocol to define for scientist missions: • The interface man machine has to be developed as well as the facility of using the files in a compatible format with the GIS that will be used in the WP1 and WP4. Meditate
WP3 • Task A. 4.Development of vehicle and sensors integration • Task A. 5. Study of fusion data method to build a 3D representation of spring based on the lateral sonar data. • Task A. 6. Test of vehicle • Task A. 7. Submarine springs survey • Task A.8. Feasibility study concerning the use of the AUV in the Syrian test site, Meditate
Deliverables • Vehicle’s specifications • Interface man machine • Data fusion méthod • Vehicle test Meditate
Milestones expected results • Month 0 +7 : interface man machine • Month 0 +11 : demonstrator of data fusion • Month 0 + 10 start of submarine springs survey Meditate