Challenges in Inverse Problems in Applied Optics: Understanding Uncertainties and Multiple Solutions
Inverse problems are "ill-posed" with multiple solutions. Uncertainties can arise from various sources such as satellite calibration, atmospheric correction, and more. For instance, uncertainties in Rrs and inversion function parameters can lead to biases. This creates significant challenges in filter-pad derived a_phi and assumed backscattering eigen-functions. Learn more about dealing with uncertainties in applied optics.

Challenges in Inverse Problems in Applied Optics: Understanding Uncertainties and Multiple Solutions
E N D
Presentation Transcript
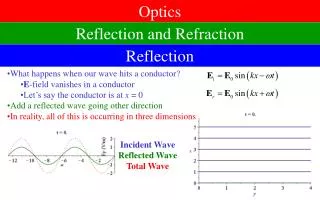
Inverse problems are “ill posed”. There may be multiple solutions. Applied optics, 2004 JGR, 2007
Uncertainties can come from several sources: Uncertainties in Rrs arising from problem with satellite calibration, atmospheric correction, adjacency effects, BRDF and averaging (temporal and spatial, remember <bb/a> is not equal to <bb>/<a>). Uncertainties in the inversion function and its parameters: e.g. polynomial coefficients, assumed eigen-functions for IOPs, assumed VSF in Hydrolight simulation etc’. For example, there is a significant uncertainty in filter-pad derived a_phi due to inability to scatter correct (other than removal of constant offset) with a significant bias introduced in blue wavelengths. Similarly, assumed backscattering eigen-functions have no pigment peaks/deeps despite the fact that we know they should have them.