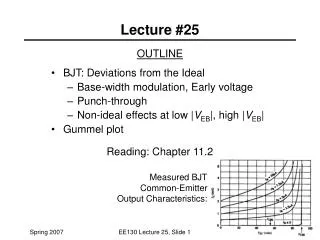
Lecture 25
Lecture 25. Dimitar Stefanov. Autonomous-Guided Wheelchairs. Go-to-goal wheelchairs. Wheelchair Control, based on Visual servoing of the head position. Shirai Lab (1997-1998). Wheelchair Control, based on Visual servoing of the head position (continue).

Lecture 25
E N D
Presentation Transcript
Lecture 25 Dimitar Stefanov
Autonomous-Guided Wheelchairs Go-to-goal wheelchairs
Wheelchair Control, based on Visual servoing of the head position Shirai Lab (1997-1998)
Wheelchair Control, based on Visual servoing of the head position (continue)
Wheelchair Control, based on Visual servoing of the head position (continue)
TAO-1 Intelligent WheelchairMain characteristics • Infared and bump sensors • Automatic visual avoidance • Voice command response • Collision avoidance • Passage through a narrow corridor • Entry through a narrow doorway • Landmark based navigation
TinMan intelligent wheelchair controllerMain characteristics • KISS Institute for Practical Robotics (KIPR) • supplemental wheelchair controller that can be retrofitted to existing wheelchairs • safely and independently operation a powered wheelchair by users who has partial visual impairment or brain damage, • sensors for obstacles detection
Autonomous guided wheelchair Nagasaki University and Ube Technical College • uses existing ceiling lights • vision sensor (position) • azimuth sensor (orientation) • wheels angle rotation sensor (odometric information) • laser range sensor (obstacles detection) • position error: 0.35 m; • angular error: 17 degrees
MAid project Research Institute for Applied Knowledge Processing FAW • robotic wheelchair for transport of elderly • semi-autonomous mode • autonomous mode • wheel encoders • fiber-optic gyroscope • sonar system • infrared sensors SICK
Wheelesley(continue) • started at Wellesley College in 1995 (Holly Yanco) • Developed at the KISS Institute • moved to the MIT Artificial Intelligence Laboratory • interface EagleEyes system (EOG - electro-oculographic potential)
NavChair(continue) • University of Michigan (Simon Levine, Johann Borenstein) • obstacle avoidance, follow walls • narrow doorway passage
NavBeltUniversity of Michigan Device for guidance of blind people. NavBelt generates acoustic cues conveyed to the user via headphones.
GuideCaneUniversity of Michigan Device for guidance of blind people. • Fully automatic ultrasonic sensor-based obstacle avoidance • Position information by combining odometry, compass, and gyroscope data
Drive Assistant(continue) • VTT Machine AutomationTampere, Finland • vehicle positioning and navigation • dead reckoning • differential GPS • passive transponders • natural landmarks in the environment • laser based navigation • part of the project FOCUS for the TIDE programme • ultrasonic sensors • M3S interface.
SENARIO(continue) • Intelligence in the navigation systems of the powered wheelchair • Autonomous mode - "go to goal" commands • Obstacles and risks avoidance system.
Intelligent wheelchair at the University of Notre Dame (1994)
PAM - AID projectPersonal Adaptive Mobility Aid for the Infirm and Elderly Blind • Infrared proximity sensors • command bar with Braile code key • tone and voice feedback • outdoor navigation PLUS physically support • Labmate mobile base • Joystick • Polaroid sonar sensors
HITOMI Yamanishi University (Japan) • “hitomi” = pupil • outdoor navigation PLUS physically support • vision system • sonar system • DGPS and digital map • voice MMI • command bar with Braille code key.