Advanced Internet-Ready RTK GPS Network Development in Puerto Rico
200 likes | 325 Vues
This project, presented by Carlos J. Rodríguez at the CGSIC Meeting 2006, aims to create the first GPS Real-Time Kinematic (RTK) network in Puerto Rico. The initiative focuses on providing centimeter-level accuracy using internet technology, integrating various GPS equipment into a unified network. The benefits include widespread State Plane Coordinate System coverage, enhanced accuracy, increased productivity, and cost reduction. The system utilizes advanced GPS technology with robust server infrastructure and proprietary software, optimizing real-time data transmission and error correction for improved survey efficiency.

Advanced Internet-Ready RTK GPS Network Development in Puerto Rico
E N D
Presentation Transcript
Internet Ready RTK GPS Network By: Carlos J. Rodríguez, PLS CGSIC Meeting May 23,2006 vernixeng.com
Project Objectives • Create the First GPS RTK Network in Puerto Rico • Stream cm. accuracy real time using internet • Integrate all GPS equipment in the same network
Project Benefits • SPCS over wide areas • Homogeneous high accuracy • Increases efficiency and productivity • Reduce Cost
RTK Basic Real Time Kinematics • GPS Base station with fix coordinated (X,Y,Z) • Radio Modem (Broadcast) • GPS Rover with radio Modem • Compute errors and broadcast the errors to the rover.
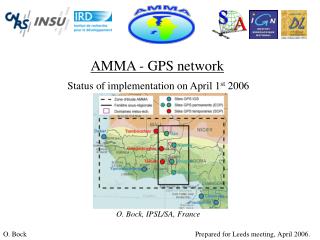
RTK Network Basic • GPS Base station with fix coordinated (X,Y,Z) • High speed internet connection • Computer Server with RTK Network Software • Compute network errors and broadcast the errors to the rover using internet
Vernix GPS Network System • GPS choke Antenna designed by NASA. • Leica GPS System 1200 Receiver system V4.0 with network connection, battery backup, 1Gb Memory. • Leica Spider Net 2.1 Software with network adjustment. • Dell Server Pentium (R) D 3.00 GHz, 2 Gb Ram, 1000 Gb memory, Internet 2, system backup.
Vernix GPS Network System • GPS choke Antenna designed by NASA. • Leica GPS System 1200 Receiver system V4.0 with network connection, battery backup, 1Gb Memory. • Leica Spider Net 2.1 Software with network adjustment. • Dell Server Pentium (R) D 3.00 GHz, 2 Gb Ram, 1000 Gb memory, Internet 2, system backup.
Vernix GPS Network System • GPS Trimble Net RS from PRMA, Bayamon. (Private) • GPS Trimble Net RS from PR4N, Coamo. (Private) • GPS Trimble Net RS from PRMI, Parguera. (NOAA) • Trimble Zephyr antenna Net RS Receiver Zephyr Antenna