Intermediate Math
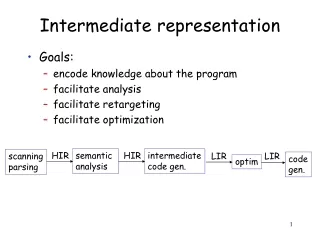
This article explores the concepts of parametric equations and their significance in mathematics, particularly in representing curves. Unlike traditional equations where one variable is a function of another, parametric equations introduce a third variable, usually time, enabling a more flexible representation of complex curves as functions of a parameter. We discuss examples like circular paths and helices, and examine the calculus associated with parametric equations, including derivatives, to understand how they describe motion in a three-dimensional space.

Intermediate Math
E N D
Presentation Transcript
Intermediate Math Parametric Equations Local Coordinate Systems Curvature Splines
Parametric Equations (1) • We are used to seeing an equation of a curve defined by expressing one variable as a function of the other. • Ex. y= f(x) • Ex. y= • A parameter is a third, independent variable (for example, time). • By introducing a parameter, x and y can be expressed as a function of the parameter, as opposed to functions of each other. • Ex. F(t) = <f(t), g(t)>, where x= f(t) and y= g(t) F(t) = <cos(t), sin(t)> - what is this curve and why is this parameterization useful?
Parametric Equations (2) • Each value of the parameter t determines a point, (f(t), g(t)), and the set of all points is the graph of the curve. • Complicated curves are easily dealt with since the components f(t) and g(t) are each functions. • Ex. F(t)=<sin(3t), sin(4t)> • Sometimes the parameter can be eliminated by solving one equation (say, x=f(t)) for the parameter t and substituting this expression into the other equation y=g(t). The result will be the parametric curve.
Parametric Equations (3) • Using parametric equations, we can easily add a 3rd dimension: • A conceptual example: • Picture the xy-plane to be on the table and the z-axis coming straight up out of the table • Picture the parameterized 2-D path (cos(t), sin(t)) which is a circle on the table • Add a simple z-component such that the circle climbs off the table to form a helix (or corkscrew), z=t • Mathematically: • Add a simple linear term in the z-direction: F(t)=<cos(t), sin(t), t>
Parametric Equations (5) • The calculus we use for parametric equations is very similar to that in single-variable calculus. • As with regular curves, parametric curves are smooth if the derivatives of the components are continuous and are never simultaneously zero. • To take the derivative of a parametric equation, take the derivative of each of the components. • If F(t)=<cos(t), sin(t), t>, then F’(t)=<-sin(t), cos(t), 1> • As with single variable calculus, the 1st derivative indicates how the path changes with time. • Note that another way to represent parametric equations is to use unit vectors. From the above example: • F(t)=<cos(t), sin(t), t> turns into: F(t) = cos(t)i +sin(t)j +tk