Download
1 / 21
210 likes | 236 Vues
An examination of the Geosat Follow-On system from an operational standpoint, focusing on data quality, improvements needed, and system performance from sensor to product. Analyzes potential benefits to operational products and strategies for error reduction and quality control.

E N D
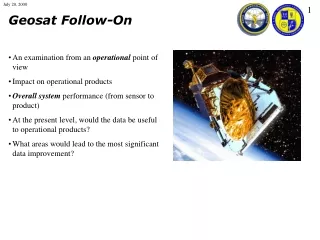
Geosat Follow-On • An examination from an operational point of view • Impact on operational products • Overall system performance (from sensor to product) • At the present level, would the data be useful to operational products? • What areas would lead to the most significant data improvement?
System, from Sensor to Product • Altimeter Instrument George Hayne, Dave Hancock (GSFC) • Water Vapor Radiometer Chris Ruf (Univ. Mich.) • Satellite Timing Influence John Lillibridge, Robert Cheney (NOAA) • Ionosphere Correction Toni Mannucci (JPL) • Dry Troposphere NOGAPS • Satellite Orbit Position Steve Klosko, Frank Lemoine (GSFC) • Cross-Comparisons C.K. Shum (Ohio St. Univ.) • NAVO Processing Gregg Jacobs, Kirk Whitmer (NRL)
Are the Data Good Enough? • This is a misleading question • Data is never good enough • QC and error reduction are the make-or-break component of environmental prediction systems • We must always strive to improve system accuracy, reduce data errors, and improve data QC We must consider the entire system Range Measurement Satellite Range Height above Ellipsoid Sea Level Non-tidal Sea Level Ocean Surface Pressure Temperature and Salinity Structure Radar Path Delays Orbit Solutions Geoid / Mean Ocean Height Tide Model Inverse Barometer (Atmospheric Load) MODAS Synthetics
Are the Data of Sufficient Quality to Include in Operation Products? • Would operational products (MODAS, NLOM) benefit from this data as it is now? • Yes • Points that must be examined to demonstrate this: • How does NAVO deal with errors inherent in the present GFO data? • To what level are the errors reduced? • How do we know products would benefit? • What is the product improvement from this data?
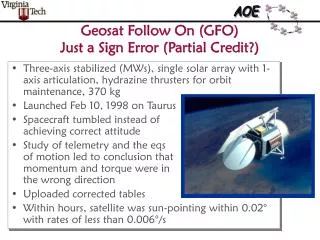
Doppler Orbit Solution Errors • Doppler-based orbit errors are on the order of a 2 meters • The oceanographic signal is lost GFO SSH using doppler orbits
Laser Orbit Solution Errors • Medium precision laser orbits errors are on the order of 10 cm • Some of the larger scale ocean circulation begins to become apparent as individual track errors average out GFO SSH using medium precision orbits
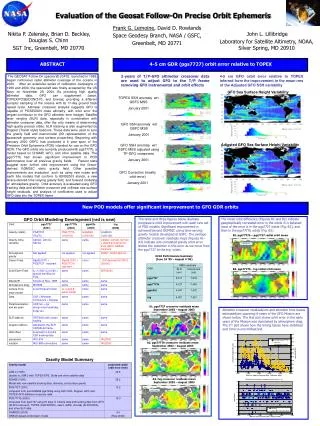
TOPEX Orbit Solution Errors • TOPEX GPS orbits have errors of a few cm • Large scale ocean circulation as well as eddy features are visible • Some ground tracks are obvious outliers due to orbit errors TOPEX SSH using GPS orbits
Orbit Error Corrections • We want to minimize orbit errors • A majority of orbit error is concentrated at long wavelengths • Taking advantage of this, we estimate and remove the orbit error from all data streams Estimated Orbit Error Amplitude 2 4 4 0 0 0 May 1, 2000 July 20, 2000
Doppler Vs. Laser Orbits after Correction • We correct ALL altimeter data sets for orbit errors • The post-correction difference is usually less than 1 cm SSH based on Laser Orbits minus SSH based on Doppler Orbits
Data Quality Control • All altimeter data streams pass through a series of quality control filters to detect and remove anomalous data • Data removed by QC procedures is flagged and tracked daily • QC removes any tracks in which data is found to be anomalous compared to historical data (orange), or in which orbit errors are not correctable (red) TOPEX GFO
What Portion of the Data are of Use? • TOPEX and GFO processed by the NAVO operational software, ALPS • Data from May 1 through July 5 Most data above 60 N is lost (ERS-2 QC analysis) Global 60S to 60N GFO 65% 81% TOPEX 85% 95% • This analysis does not include ALL possible data, but all GDR data from NAVO • Events such as the loss of data from being out of ERO are not included Percent of data usable for each day during May and June
What are the Causes of Data Loss? • Doppler orbit splicing appears to be the major contributor to data loss • The tracks removed by the QC algorithms from December 1999 indicate laser-based SSH minus doppler-based SSH to have discontinuities
What is the Data Accuracy? • SSH Anomaly difference at points where satellite ground tracks cross one another indicate measurement errors (though actual oceanographic variations will affect the difference) • RMS crossover differences of a satellite with itself are a measure of consistency and noise within the individual measurement system, while crossover differences with other satellites are a measure of consistencies between measurement systems RMS Crossover differences (cm) between 55S and 55N SSH difference
SSH Anomaly • Offline T/P and GFO output from ALPS GFO TOPEX
SSH Anomaly • Offline T/P and GFO output from ALPS GFO TOPEX
SSH Anomaly • Offline T/P and GFO output from MODAS 2-D (analysis for June 15, 2000) GFO TOPEX GFO + TOPEX
Suppose There is an SSH Error, What are the MODAS Temperature Errors? • Assume a 5 cm sea surface height error, what are the errors induced in MODAS synthetics?
Expected SSH Errors • Offline T/P and GFO output from MODAS 2-D (analysis for June 15, 2000) GFO TOPEX GFO + TOPEX Missing Data Between tracks
Models • The NLOM system is presently assimilating TOPEX and ERS-2 NAVO BOGUS positions based on MCSST NLOM SSH
Model Assimilation Errors • Based on twin model experiments • Errors are dependent on ground track coverage and quantity of data • Increased data quantity improves model results
A substantial portion (81%) of GFO data is presently useful in operational products • Operational products will benefit from this data • Data improvement efforts would continue to increase the data return and accuracy GFO