Download

1 / 24
240 likes | 471 Vues
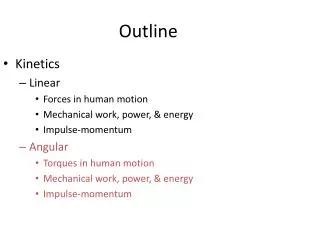
Human Movement Control: The Regulation of the Angular Momentum in the CM frame Spin Regulation. Dr. Marko B Popovic Leg Lab / Biomechatronics Group @ Artificial Intelligence Lab, MIT Boston University, March 20, 2003. The MIT Biomechatronics Group. Biological Muscle. Artificial Muscle.

E N D
Human Movement Control: The Regulation of the Angular Momentum in the CM frameSpin Regulation Dr. Marko B Popovic Leg Lab / Biomechatronics Group @ Artificial Intelligence Lab, MIT Boston University, March 20, 2003
The MIT Biomechatronics Group Biological Muscle Artificial Muscle New Biologically Inspired Actuators
The MIT Leg Lab Technology Science Rehabilitation
Technology Science CM Force and Torque for human movement Virtual Model Control Joint Torques for Powered O&P Systems Rehabilitation Robust robo-locomotion
December 2001(very late in the night)Bug in the code? Sample plot for swaying in frontal plane: Mediolateral CM-CP and ground reaction force
Hypothesis CM CP “For steady state locomotion tasks, angular momentum in the CM frame (spin) is regulated, or conserved, locally in time.”
Z Frontal Plane Rotations Sagittal Plane Rotations Y CMC= 0.98 CMC=0.96 CM X Results: Standing 10
Z Frontal Plane Rotations Y Sagittal Plane Rotations CMC = 0.91 CMC = 0.93 CM X Results: Walking
Angular Momentum RegulationSeptember 2002 Summary • Explained dynamics data • Standing (swaying test): ~ 0.95 • Walking (self selected speed): ~ 0.90 • Running (self selected speed): ~ 0.70
“Newtonian mechanics dictates that a legged system must conserve its angular momentum during the flight phase. How nearly do legged systems conserve angular momentum during the stance phase? It is not required for momentum to be conserved during stance because the legs can exert forces on the ground to accelerate the system. However, a control that keeps the angular momentum constant during stance could achieve higher efficiency and better performance.” Marc Raibert “Newtonian mechanics dictates that a legged system must conserve its angular momentum during the flight phase. How nearly do legged systems conserve angular momentum during the stance phase? It is not required for momentum to be conserved during stance because the legs can exert forces on the ground to accelerate the system. However, a control that keeps the angular momentum constant during stance could achieve higher efficiency and better performance.” Angular Momentum Thoughts {excerpt from the book “Legged robots that balance” (‘86)}
Spin Partition • How is the angular momentum distributed throughout the body? What is the contribution of the various links? • Is partition like structure present? • If total spin is regulated are partitions regulated too? • One approach via principal component analysis (PCA)
Walking - Sagittal Plane Rotations: Variance Explained by Principal Components
Walking-Sagittal Plane Rotations: First Principal Component 1 Left foot 2 Right foot 3 Left shank 4 Right shank 5 Left thigh 6 Right thigh 7 Left hand 8 Right hand 9 Left forearm 10 Right forearm 11 Left upper arm 12 Right upper arm 13 trunk & head
Why local regulation?How local? • Large amplitudes of spin are suppressed quickly (high frequencies) while small amplitudes last longer (low frequencies). Condition for instability • Back of the envelop calculation of critical γ =LΔt factor: use L = Iω, for normal subject m~100kg, h~2m I~10kgm^2, assuming Δθ ~ π/6 γcr ~ 5 Nms^2 Observations • Observedγ is at least one order (10 times) smaller!
Forces & Angular Momentum: walking, sagittal plane “Linear” dynamics in the horizontal planeWhy does this work? Angular Momentum! Measured Force Model Force 10 xAngular Momentum 100 γ~0.25 Nms^2 50 N Nms N 0 -50 -100
What is stability? Stable points (or states) are those to which the system returns after being slightly perturbed Some stable states are more stable than other stable states Stable states could be both time dependent and time independent To determine stability range and understand characteristics of the well we need to perturb the system and see how it behaves local minimum
BALance DisturbER platform experiment (Meyer and Oddsson 2002) • Lateral perturbations: • 0.6 g acceleration (17,33,50,67, 83 ms) • respective period of constant velocity (10,20,30,40,or 50 cm/s) • 1.0 g deceleration • total travel distance 25 cm • 3 left & 3 right trials for each type • all randomized • Kinematics and force plate data collected
Lateral trajectories: CM, CP and Balder Center of Mass Center of Pressure Balder Platform
Lateral component of the Spin γ~0.25 Nms^2
Questions - What is the mechanism by which body regulates spin? • Dominant passive control vs. dominant active control • or interplay between the two? • Is spin regulation based on the regulation of the CP trajectory? - How is this control partitioned? ??? - …
Examples of active spin control ROBOT HUMAN
Sometimes unrelated to the control of the CP trajectory WALKING THE TIGHT ROPE Standard trick - pass the angular momentum from the orbital to the spin part
Conclusion • Spin - important quantifier of human dynamics • Hypothesis on spin regulation → explained dynamics: Standing ~ 95%, Walking ~ 90%, Running ~70% • Significant portion of walking explained by one PC • Non conserved spin & balance when CP constrained (active transfer between orbital & spin part) • Some questions answered, many more opened
Collaborators:W. Gu, undergraduate student, physics seniorLeg Lab @ AI Lab; Physics Department, MIT Dr. H. Herr, Leg & Biomechatronics Group DirectorHarvard Medical School, Spaulding Rehabilitation Hospital Spaulding Gait Lab NMRC BU J. L. Lelas M. D. Lazzara D. Sherrill Dr. P. O’Riley Dr. P. Bonato Dr. P. Meyer Dr. L. Oddsson