Vehicular Platooning with MAS-net Platform
10 likes | 110 Vues
Explore the MAS-net platform for implementing vehicular platooning systems using MAS-mote robots. The platform enables testing and studying the efficiency, control, and dynamics, aiming for safe and trusted Automated Highway Systems. Solve common compilation and uploading errors with TinyOS and Cygwin along with tips for tool version warnings. Learn from past research on platooning projects like California PATH and SARTRE. Discover future work on testing applications, linking RobotCommander, and optimizing MAS-mote functionality while acknowledging contributors.

Vehicular Platooning with MAS-net Platform
E N D
Presentation Transcript
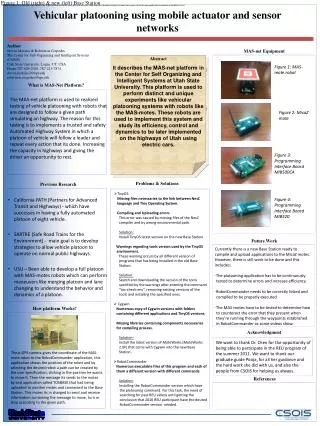
Figure 1: Old (right) & new (left) Base Station The necessary equipmentfor the vehicle platooning project consisted of the MAS-net platform with a p-GPS (pseudo–global positioning system) camera mounted above the platform, both parts are essential to the movement control in platooning commands and positioning direction of the MAS-mote robots. The necessary equipmentfor the vehicle platooning project consisted of the MAS-net platform with a p-GPS (pseudo–global positioning system) camera mounted above the platform, both parts are essential to the movement control in platooning commands and positioning direction of the MAS-mote robots. Vehicular platooning using mobile actuator and sensor networks Author Steven Morales & Robertson Cespedes The Center for Self-Organizing and Intelligent Systems (CSOIS) Utah State University, Logan, UT, USA Phone:787-629-2029, 787-225-7874 steven.morales2@upr.edu robertson.cespedes@upr.edu MAS-net Equipment Abstract It describes the MAS-net platform in the Center for Self Organizing and Intelligent Systems at Utah State University. This platform is used to perform distinct and unique experiments like vehicular platooning systems with robots like the MAS-motes. These robots are used to implement this system and study its efficiency, control and dynamics to be later implemented on the highways of Utah using electric cars. Figure 1: MAS-mote robot What is MAS-Net Platform? The MAS-net platform is used to realized testing of vehicle platooning with robots that are designed to follow a given path simulating an highway. The reason for this testing is to implements a trusted and safety Automated Highway System in which a platoon of vehicle will follow a leader and repeat every action that its done. Increasing the capacity in highways and giving the driver an opportunity to rest. Figure 2: MicaZ mote Figure 3: Programming Interface Board MIB500CA Problems & Solutions Previous Research • TinyOS Missing files necessaries to the link between NesC language and Tiny Operating System. Compiling and Uploading errors This error was caused by missing files of the NesC compiler and by wrong environmental path. Solution: Install TinyOS latest version on the new Base Station Warnings regarding tools version used by the TinyOS environment. These warning occurs by all different version of programs that has being installed in the old Base Station. Solution: Search and downloading the version of the tools specified by the warnings after entering the command “tos-check-env”, removing existing versions of the tools and installing the specified ones. • Cygwin Numerous copy of Cygwin versions with folders containing different applications and TinyOS versions. • Missing libraries containing components necessaries for compiling process. Solution: Install the latest version of MoteWorks (MoteWorks 2.0F) that come with Cygwin into the new Base Station. • RobotCommander Numerous executable files of this program and each of them a different version with different commands. Solution: Installing the RobotCommander version which have the platooning command. For this task, the need of searching for past REU videos until getting the conclusion that 2010 REU participant have the desired RobotCommanderversion needed. • California PATH (Partners for Advanced Transit and Highways) - which have successes in having a fully automated platoon of eight vehicle. • SARTRE (Safe Road Trains for the Environment) - main goal is to develop strategies to allow vehicle platoon to operate on normal public highways. • USU – Been able to develop a full platoon with MAS-motes robots which can perform maneuvers like merging platoon and lane changing to understand the behavior and dynamics of a platoon. Figure 4: Programming Interface Board MIB520 Future Work Currently there is a new Base Station ready to compile and upload applications to the MicaZ motes. However, there is still work to be done and this includes: ·The platooning application has to be continuously tested to determine errors and increase efficiency. ·RobotCommanderneeds to be correctly linked and compiled to be properly executed ·The MAS-motes have to be tested to determine how to counteract the error that they present when they’re running through the waypoints established in RobotCommander as some videos show. How platform Works? Acknowledgment We want to thank Dr. Chen for the opportunity of being able to participate in the REU program of the summer 2011. We want to thank our graduate guide Pooja, for all her guidance and the hard work she did with us, and also the people from CSOIS for helping us always. • The p-GPS camera gives the coordinate of the MAS-mote robot to the RobotCommander application, this application shows the position of the robot and by selecting the desired robot a path can be created by the user specification, clicking in the position he wants to move it. Then the message its sends to the motes by and application called TOSBASE that had being uploaded to another motes and connected to the Base Station. This motes its in charged to send and receive information containing the message to move, turn or stop according to the given path. References

![Self-Organization in Autonomous Sensor/Actuator Networks [SelfOrg]](https://cdn0.slideserve.com/1182744/self-organization-in-autonomous-sensor-actuator-networks-selforg-dt.jpg)


![Self-Organization in Autonomous Sensor/Actuator Networks [ SelfOrg ]](https://cdn1.slideserve.com/2192758/self-organization-in-autonomous-sensor-actuator-networks-selforg-dt.jpg)
![Self-Organization in Autonomous Sensor/Actuator Networks [ SelfOrg ]](https://cdn1.slideserve.com/2361302/self-organization-in-autonomous-sensor-actuator-networks-selforg-dt.jpg)