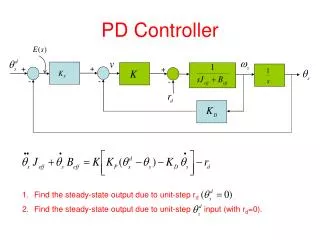
PD Controller
PD Controller. +. +. +. -. -. -. Find the steady-state output due to unit-step r d . Find the steady-state output due to unit-step input (with r d =0). PID Controller. +. +. +. +. -. -. -.

PD Controller
E N D
Presentation Transcript
PD Controller + + + - - - • Find the steady-state output due to unit-step rd . • Find the steady-state output due to unit-step input (with rd=0).
PID Controller + + + + - - - • Find the steady-state output due to unit-step rd (assume ). • Find the steady-state output due to unit-step (assume rd = 0).
Selection of gains KP , KI and KD: Characteristic equation is: For stability:
PID Controller Design with Root-locus + + + - - • On s-plane, mark the plant poles and zeros. • Where should be controller zeros be located for a good response?
Im s Two poles at the origin (one of the system and another of the PID controller) Re s -5
controller zeros Choose KD for real repeated poles.