Download
1 / 15
150 likes | 306 Vues
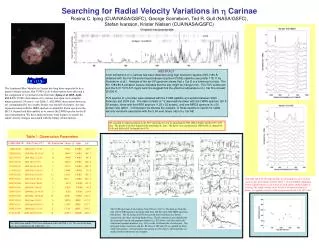
The accuracy of Giraffe measurements of radial velocity in young clusters. Richard Jackson – Keele University in collaboration with Rob Jeffries and Amy Dobson - Keele Jim Lewis and Sergey Koposov - Casu. The accuracy of Giraffe measurements of

E N D
The accuracy of Giraffe measurements of radial velocity in young clusters Richard Jackson – Keele University in collaboration with Rob Jeffries and Amy Dobson - Keele Jim Lewis and Sergey Koposov - Casu
The accuracy of Giraffe measurements of radial velocity in young clusters Gamma Velorum cluster To study cluster kinematic substructure We need to know • Typical uncertainty in RV (using MAD) • Tail of the uncertainty distribution in RV (3) Any bias in RV with SNR and/or Teff Lithium rich Jeffries, Jackson, Cottaar et al. 2013 One distribution or two? ? Frequency RV (km/s)
Empirical “Poisson” uncertainty in RV - for short term repeats Spectra vs SNR and vsini Derive a normalised uncertainty -independent of SNR and vsini Measured uncertainty of repeat observations
Empirical “Poisson” uncertainty in RV - for short term repeats Spectra vs SNR and vsini Reduce to normalised uncertainty independent of SNR and vsini Measured uncertainty of repeat observations Normalised uncertainty
Empirical “Poisson” uncertainty in RV - for short term repeats 8463 repeats in 8 clusters Gama2Vel Cha_I rho_oph NGC2264 NGC2547 NGC2516 NGC6633 IC4665 + field stars (Corot sample) Fix C = 26.5 Fix Bav=5.7 RV/2 x SNR/(1+vsini2/C2) RV/2 x SNR Uncertainty normalised to Find B(Teff) RV/2 x SNR/(1+vsini2/C2) where B varies with Teff and B/C2 constant logTeff
Uncertainty in wavelength calibration - for long term repeats Change day 1 to 2 plate 1 Change day 1 to 2 plate 2 Simcal 0.22 & 0.23 Uncertainty 0.08 & 0.09 Simcal -0.10 & -0.17 Uncertainty 0.15 & 0.08 Change day 2 to 3 plate 1 Change day 2 to 3 plate 2
Uncertainty in wavelength calibration - for long term repeats Simcal 0.22 & 0.23 Uncertainty 0.08 & 0.09 Change day 1 to 2 plate 1 Change day 1 to 2 plate 2 Simcal -0.10 & -0.17 Uncertainty 0.15 & 0.08 Change day 2 to 3 plate 1 Change day 2 to 3 plate 2 SIMCAL offset in wavelength scale varies through night - In similar way for all filters. Appears to be a “mechanical offset” - independent of SNR & vsini
Total uncertainty in RV - for long term repeats between OBs Normalised uncertainty Poisson uncertainty (2 spectra per OB) Total uncertainty between OBs (2047 repeats) Poisson term A = 0.28 km/s B = 5.70 km/s C = 26.5 km/s Cumulative probability Wavelength term Normalised uncertainty
Total uncertainty in RV - for long term repeats between OBs Normalised uncertainty Poisson uncertainty (2 spectra per OB) Total uncertainty between OBs 2047 repeats Poisson term A = 0.28 km/s B = 5.70 km/s C = 26.5 km/s Cumulative probability Wavelength term Tail of empirical uncertainty between OBs Fraction of population Normalised uncertainty Tail of Poisson uncertainty RV / (normalisation factor)
Total uncertainty in RV - for long term repeats between OBs Normalised uncertainty Poisson uncertainty (2 spectra per OB) Total uncertainty between OBs 2047 repeats Poisson term A = 0.28 km/s B = 5.70 km/s C = 26.5 km/s Cumulative probability Wavelength term Normalised uncertainty Comparison empirical and Velclass uncertainties -Velclass uncertainties are ~ 2 higher.
Absolute accuracy of RVs observed in HR10, HR15N and HR21 23 standards Standard stars RV of standards from Soubiran et al. 2013 rms uncertainty 0.04km/s
Absolute accuracy of RVs observed in HR10, HR15N and HR21 23 standards Standard stars Field stars RV = 0.32 km/s RV = 0.09 km/s RV of standards from Soubiran et al. 2013 rms uncertainty 0.04km/s Data set GE_SD_CR ~1500 Corot targets
Variation in absolute RV between HR10 and HR21 filters Apparent bias in Velclass RVs (for HR21) a function of SNR and/or Teff?
Possible causes of difference in RV measured by Velclass and CCF method Target HIP066032 (Spt K2) RV template hi-res synthetic 50-4.0-0.0 (COELHO 2005) Velclass method CCF method Measured difference in RV Differences in templates used
The accuracy of Giraffe measurements of radial velocity in young clusters • Comparison of repeat measurements of RV in young clusters shows that the measurement uncertainty can be normalised to a simple function of SNR and vsini with a weaker dependence stellar properties. • The measurement uncertainty at higher SNR is dominated by a fixed uncertainty of ~0.28km/s due to changes in wavelength calibration between setups. • Analysis of RVs of standard stars shows a bias of ~0.4km/s for measurements made using HR21 (but no significant bias for HR10 and HR15N). The most likely cause is a mismatch between target spectra and synthetic RV templates. • Where possible stellar properties used to select RV templates should be fixed for each target - based on the best available estimates of Teff, logG and Fe/H. • Following the planned change to GAIA/Phoenix synthetic spectra revised RVs should be re-analysed for evidence of bias with Teffand/or SNR in all filters.