Understanding Fourier Transforms and System Properties in Signal Processing
This document explores key concepts in signal processing, including the uniqueness of the Fourier transform and its implications for analyzing signals. It discusses the preservation of signal strength through Fourier series as evidenced by Parseval's relations. Furthermore, it examines system properties such as memorylessness, time invariance, linearity, causality, and stability, providing insights into how these characteristics affect signals and systems. Relevant examples clarify the concepts, ensuring a comprehensive understanding of these fundamental principles.

Understanding Fourier Transforms and System Properties in Signal Processing
E N D
Presentation Transcript
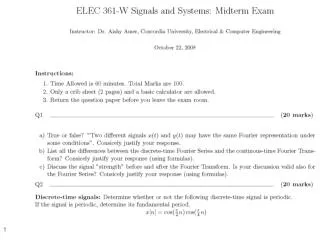
Solutions Q1: False. The Fourier transform is unique. If two signals have the same Fourier transform, then there is a confusion when trying to find the inverse transform. Violates the assumption that x(t) and y(t) are different
Q1c: Solution • c) The signal strength before and after the Fourier transform and Fourier series remains the same. This is evident from Parseval’s Relations:
Q3: Solution (Memory & Time Invariance) • System is not memoryless because y(t) depends on x(t-2) for some t • System is not time-invariant, because y1(t) ≠ y2(t) below
Q3: Solution (Linearity) • System is linear
Q3: Solution (Causality) • System is causal. Because the system is not LTI, we cannot use the h(t) = 0 for t < 0 test. However, we can use the following test: A linear non-TI system is causal if x(t) = 0 for t < t0 then y(t) = 0 for t < t0 For our system, the above is true for t0=0 as in the definition. So system is causal • We can also see that the output y(t) depends on current x(t) and past x(t-2) values of the input
Q3: Solution (Stability) • Note that because the system is not LTI, we could not use the test • System is BIBO stable
Q5: Solution • We have • Taking the inverse transform, we get