Motion and Manipulation
310 likes | 459 Vues
Motion and Manipulation. 2008/09 Frank van der Stappen Game and Media Technology. Context. Robotics. Games (VEs). Geometry. Motion Planning. Robotics. Motion Planning. Autonomous Virtual Humans (Creatures). Motions. User in VE: Collision detection Autonomous entity: motion planning.

Motion and Manipulation
E N D
Presentation Transcript
Motion and Manipulation 2008/09 Frank van der Stappen Game and Media Technology
Context Robotics Games (VEs) Geometry
Motion Planning • Robotics
Motion Planning • Autonomous Virtual Humans (Creatures)
Motions • User in VE: Collision detection • Autonomous entity: motion planning
Linkages • Kinematic constraints
Linkages • VR Hardware
Anthropomorphic robot arms/hands + advanced sensory systems = expensive not always reliable complex control Conventional Manipulation
RISC • ‘Simplicity in the factory’[Whitney 86]instead of‘ungodly complex robot hands’[Tanzer & Simon 90] • Reduced Intricacy in Sensing and Control[Canny & Goldberg 94] = • simple ‘planable’ physical actions, by • simple, reliable hardware components • simple or even no sensors
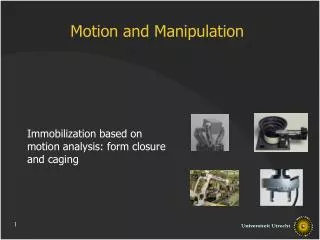
Manipulation Tasks • Fixturing, grasping • Feeding push, squeeze, topple, pull, tap, roll, vibrate, wobble, drop, … Parts Feeder
Parallel-Jaw Grippers • Every 2D part can be oriented by a sequence of push or squeeze actions. • Shortest sequence is efficiently computable [Goldberg 93].
Feeding with ‘Fences’ • Every 2D part can be oriented by fences over conveyor belt. • Shortest fence design efficiently computable[Berretty, Goldberg, Overmars, vdS 98].
Feeding by Toppling • Shortest sequence of pins and their heights efficiently computable [Zhang, Goldberg, Smith, Berretty, Overmars 01].
Vibratory Bowl Feeders • Shapes of filtering traps efficiently computable[Berretty, Goldberg, Overmars, vdS 01].
Course Material • Steven M. LaValle, Planning Algorithms, 2006, Chapters 3-6. Hardcopy approximately € 50-60. http://msl.cs.uiuc.edu/planning/index.html. Free! • Robert J. Schilling, Fundamentals of Robotics: Analysis and Control, 1990, Chapters 1 and 2 (partly). Copies available. • Matthew T. Mason, Mechanics of Robotic Manipulation, 2001. Price approximately € 50.
Teacher Frank van der Stappen http://people.cs.uu.nl/frankst/ • Office: Centrumgebouw Noord C226; phone: 030 2535093; email: frankst@cs.uu.nl • Program leader for Game and Media Technology; MSc projects on manufacturing and motion planning
Classes • Monday 9:00-10:45 in BBL-513, starting September 8. • Wednesday 9:00-10:45 in BBL-503, starting September 3.
Exam Form • Written exam about the theory of motion and manipulation; weight 60%. • Summary report (> 10 pages of text) on two assigned papers followed by a 15-minute discussion; weight 40%. • Additional requirments: • Need to score at least 5.0 for written exam to pass course. • Need to score at least 4.0 to be admitted to second chance
Geometric Models • Moving robot, stationary obstacles • Boundary representation vs. solid representation • Polygons/polyhedra • Convex / nonconvex • Semi-algebraic parts • Other models
Representations Obstacles/robot • polygons/polyhedra (convex/non-convex) • semi-algebraic sets Represented • as solids • by their boundaries convex q p X
Polygonal Models • Boundary representation List vertices in counterclockwise order: (x1,y1),(x2,y2),(x3,y3),(x4,y4), … (x4,y4) (x3,y3) (x2,y2) (x1,y1)
Polygonal Models • Solid representation for convex polygons: intersection of half-planes
Polygonal Models • Solid representation for convex polygons: intersection of half-planes Bounded by a line y=ax+b or ax+by+c=0 Zero level set of f(x,y)=ax+by+c
f1(x,y)=2x+y+1 f2(x,y)=-2x-y-1 Half-planes H1={ (x,y) | f1(x,y)≤0 } H2={ (x,y) | f2(x,y)≤0 }
Polygonal Models • Convex m-gon: intersection of m half-planes Hi, X = H1 ∩ H2 ∩ ... ∩ Hm. • Polygon with n vertices: union of k convex polygons, X = X1 U X2 U … U Xk. • Complex polygonal sets: unions of intersections too.
Polyhedral Models • Boundary representation: vertices, edges, polygonal faces, e.g. doubly-connected edge list (DCEL). • Solid: union of intersection of half-spacesH = { (x,y,z) | f(x,y,z) ≤ 0 } withf(x,y,z) = ax+by+cz+d.
Semi-Algebraic Sets • Union of intersection of sets H = { (x,y) | f(x,y) ≤ 0 }, where f(x,y) is now a polynomial in x and y with real coefficients (in 2D). f(x,y)=-x2+y f(x,y)=x2+y2-4 non-convex H H bounded