** "Particle Filtering for Signal Tracking: Results, Comparison, and Considerations" **
This text explores the implementation of Particle Filtering for signal tracking, comparing results with Kalman Filtering and identifying key considerations. It delves into the process of assigning values to parameters, generating particle observations, and estimating states. Further analysis includes predicting and updating states, computing autocorrelations, LPCs, and noise variances. The discussion touches on resampling of states, the impact of standard deviations and initial observations, and the challenges in modeling noisy signals accurately. The comparison between Kalman and Particle Filter implementations highlights the importance of order values and the number of particles in achieving reliable results. **

** "Particle Filtering for Signal Tracking: Results, Comparison, and Considerations" **
E N D
Presentation Transcript
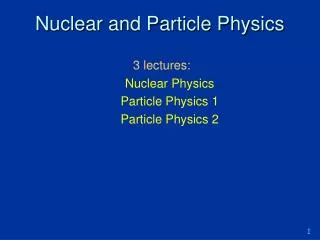
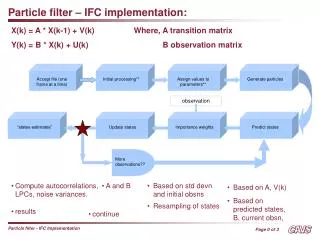
X(k) = A * X(k-1) + V(k) Y(k) = B * X(k) + U(k) Where, A transition matrix B observation matrix Accept file (one frame at a time) Initial processing** Assign values to parameters** Generate particles observation “states estimates” Predict states Update states Importance weights Predict states More observations?? • Compute autocorrelations, LPCs, noise variances. • A and B • Based on std devn and initial obsns • Based on A, V(k) • Based on predicted states, B, current obsn, • Resampling of states • results • continue • Particle filter – IFC implementation:
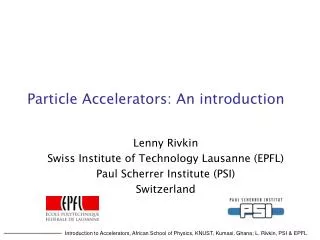
Results from Kalman and Particle filtering IFC Original signal Kalman-filtered particle-filtered
Particle Filtering for filtering: • Kalman filtering implementation gives some reasonable results: • Order affects the results. • Tracking (/ filtering) of the speech is possible. • Particle filtering as used for filtering (similar to Kalman filter implementation) : • Computation results at each block are correct (mathematically). • Has different results (strange results) as compared to the one had with Kalman filter. • Reasons: (probable) • Lesser number of particles • Lesser order value • Noisy signal cannot be modeled by a single Gaussian distribution. • Modeling of speech signal in the way done is flawed. • Code has some serious problems [Huh?] Ruled out. (different number of particles tried) 50, 100, 700 Ruled out. (different orders tried) 5, 8, 10 Ruled out. But code has not yet been reviewed.