Download
1 / 1
10 likes | 245 Vues
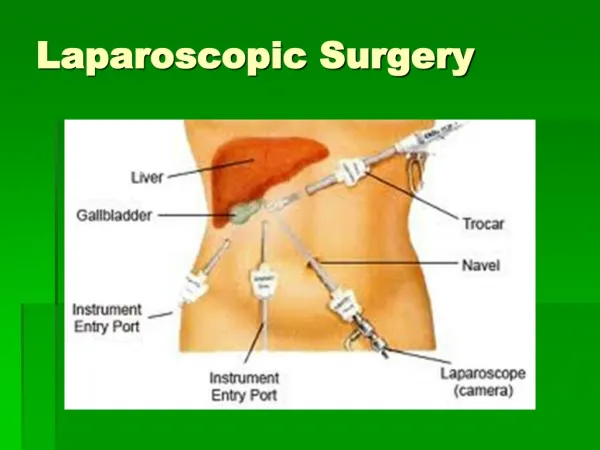
Comparison of knot tying in robotic, laparoscopic and open surgery Jan H, Nobbenhuis MAE, Ind TEJ Department of Gynaecological Oncology, The Royal Marsden NHS Foundation Trust, Fulham Road, SW3 6JJ, London.

E N D
Comparison of knot tying in robotic, laparoscopic and open surgery Jan H, Nobbenhuis MAE, Ind TEJDepartment of Gynaecological Oncology, The Royal Marsden NHS Foundation Trust, Fulham Road, SW3 6JJ, London. The same plastic sponge cylinder system was used to tie open knots. They were timed and filmed also. In total 150 knots were tied 50 from each group. The knots were tested as follows. The knots were randomly selected from each envelope. They were then placed on a Tensiometer. Using the tensiometer, the width the tensiometer reached before the first sign of resistance was noted. This value represented the tightness of the knots. The maximum tension of the knot was noted. The security of the knot was decided by whether or not the tie snapped or slipped. If the knot slipped it was marked as insecure. If the knot snapped it was deemed a secure tie. With each knot tested a graph was printed showing these values and the tension curve. The results were then tabulated and place in an excel worksheet. The Shapiro-Wilks test for normality demonstrated that all data was significantly different from a normal distribution. Therefore data were presented as medians with inter-quartile ranges. Comparative analysis between the two groups was performed using the Wilcoxon sign rank test. During the knot tightness test, where there was a broken loop, a value of 99mm was assigned to that loop for the purpose of the Wilcoxon test to ensure that that loop was ranked as having the highest diameter. During the knot strength analysis, were there was a broken loop, a value of 0N was assigned to that loop for the purpose of the Wilcoxon test to ensure that that loop was ranked as having the highest diameter. The comparative analysis for the security of the knot (whether it slipped or broke) was done using a Yates-corrected Chi². Objectives Methods Conclusions Two Gynaecological surgical trainees who were competent laparoscopic surgeons particularly in the ability of laparoscopic knot tying were selected. They had no prior experience in robotic surgery. Three sessions were then organised to tie knots. The first session was the robotic knot tying. A 1/2 hour tutorial of using the DaVinchi system was undertaken prior to starting. The knots were set up around a plastic sponge cylinder. 2-0 vicryl ties were used as it a commonly used material in both open and minimal access surgery. The sponge cylinder was tied down to an operating table and the vicryl held in place with blue tach. The knots were tied one at a time using a DaVinci robot using a needle holder and grasper to mimic in vivo situations. It standard surgical knot was tied using 3 throws. One practice knot was allowed then 25 knots were tied by each operator giving a total of 50 knots. The knot tying was filmed continuously and timed. The knots were removed from the sponge cylinders, being careful not to roll the knots, and placed in sealed labeled envelopes for later testing. The same plastic sponge cylinder system secured in a laparoscopic surgery simulator. One practice knot was allowed. The knots were tied, filmed and timed in the same way. They were removed and stored in sealed labelled envelopes. Robotic knot tying in the hands of trained laparoscopic surgeons were as fast as and tighter than laparoscopic knot tying and more secure but slower than open tying. The lack of haptic feedback can lead to snapped knots as a result of excessive force and with the introduction of newer systems further improvements in time and quality of knots could be expected. Over the last 30 years, the transition from a large single open incision to a few small keyhole incisions to gain access to the abdominal cavity has revolutionized abdominal and pelvic surgery. The efficacy and safety has been established and has given the advantage of smaller incisions, faster patient recovery with shorter inpatient stay, improved cosmetic result, reduced analgesic requirement, potentially faster procedures and better patient satisfaction. (1,2) However, in conventional laparoscopy, the operator is faced with certain constraints such as the lack of three-dimensional visualization, limited tactile feedback and a restriction in the degrees of freedom of movements because of fixed point of insertion of non-articulating instruments. There is also potential inaccuracy during delicate reconstruction because of natural hand tremor, awkward hand-eye coordination, and interior ergonomics. Robotic surgery is reported to have many potential further benefits for the surgeon addressing some of the impediments of conventional laparoscopy. Using the DaVinchi robot, all movements by the comfortable seated operator from the instrument handles are transformed into electronic signals, filtered, scaled and transmitted in real time to the motorized robotic instrument tips. The cable-driven mechanical endo-wrist instruments articulate the instrument tips in any direction delivering the dexterity of the surgeon’s hand and wrist to the operative site. This makes the system more comfortable, ergonomic with intuitive motions, six degrees of freedom, less operator fatigue and tremor filtration facilitating more precise movements. The DaVinci system also incorporates a natural stereoscopic 3D vision which provides the eyes of the user with a viewpoint derived from a two-channel endoscope. Current generation robots lack haptic feedback though may addressed in future iterations of the DaVinchi system. Costs and size of the system are also criticisms. Robotic enthusiasts lay claim to rapid acquisition of skills using robotically assisted laparoscopic systems, achieving at least as good clinical outcomes as straight stick laparoscopy, within a shorter operating time once the initial learning curve has been overcome. In an effort to evaluate the surgical performance advanced surgical platforms we compared standard laparoscopy, DaVinci robot (Intuitive Surgical, Sunnyvale, CA) and standard open knot tying of two experienced gynecological surgery trainees. The parameters looked at were length of time taken to tie a knot, the strength and tightness of the knots. Results The following results were from both subjects data combined. The robotic knots (Median difference 1.0 mm CI 0.0 to 2.0 mm P = 0.021) and the open knots (Median difference 1.5 mm CI 0.5 to 2.0 mm, P = 0.0001) were both significantly tighter than Laparoscopic knots. - There was no difference between any of the knots in the amount of force needed to cause the knot to slip or break. The open knot tying was much faster than both the robotic and laparoscopic knot tying with a Median difference of 107.5 s (CI 93.0 to 125.0 s P < 0.0001) and 115.0 s (CI 99.0 to 144.5 s P < 0.0001) respectively. There was no statistically significant difference between the laparoscopic and robotic knot ties. With regards to the security of a knot, a knot was defined as secure if it failed by breakage. If it failed by slippage or was a broken loop then it was defined as insecure. There was no statistical difference in security in robotic vs laparoscopic knots or in laparoscopic vs open knots. The robotic knots were more secure than the open knots Odds Ratio = 0.351351 (95%CI = 0.151589 to 0.814361). Yates-corrected Chi² = 5.135823 P = 0.0234. 3 robotic knots snapped during the knot tying, one snapped during open tying and none snapped laparoscopically. References 1. Berggren U, Gordh T, Grama D, et al. Laparoscopic versus open cholecystectomy: hospitalization, sick leave, analgesia and trauma responses. Br J Surg. 1994;81:1362–1365. 2. Golub R, Siddiqui F, Pohl D. Laparoscopic versus open appendectomy: a metaanalysis. J Am Coll Surg .1998;186:545–553. 3Yohannes, P., et al., Comparison of robotic versus laparoscopic skills: is there a difference in the learning curve? Urology, 2002. 60(1): p. 39-45; discussion 45. 4 Rashid TG, Kini M, Ind TE Comparing the learning curve for robotically assisted and straight stick laparoscopic procedures in surgical novices. Int J Med Robot. 2010 Sep;6(3):306-10. 5 Cho J. E. , Shamshirsaz A. H. A. Et al. New technologies for reproductive medicine: laparoscopy, endoscopy, robotic surgery and gynecology. A review of the literature. Minerva Ginecologica 2010 April;62(2):137-67