Controlling Individual A gents in High Density Crowd Simulation
300 likes | 480 Vues
Controlling Individual A gents in High Density Crowd Simulation. N. Pelechano , J.M. Allbeck and N.I. Badler (2007). Outline. Introduction Related Work The Model Results Conclusions Assesments. The Authors. N. Pelechano Assoc. Prof. at Catalunya University.

Controlling Individual A gents in High Density Crowd Simulation
E N D
Presentation Transcript
Controlling Individual Agents inHigh Density Crowd Simulation N. Pelechano, J.M. Allbeck and N.I. Badler (2007)
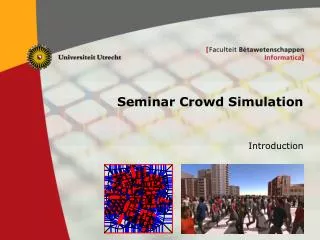
Outline • Introduction • Related Work • The Model • Results • Conclusions • Assesments
The Authors • N. Pelechano • Assoc. Prof. at Catalunya University. • Crowd simulation, real-time 3D, human-avatar interactions • J.M. Allbeck • Assist. Prof. at George Mason University. • Animation, AI, physcology in crowds • N.I. Badler • Professor at University of Pennsylvania • Computational connections between language and action
Introduction • A model for High Density Autonomous Crowds (HiDAC) • Natural, realistic crowd simulation • Handle high density • Adapt to dynamic changes
Introduction • Hybrid approach • Physical forces with rules: • Physiological (locomotion) • Psychological (personality, panic..) • Geometrical (distance, angles..) • Two levels: • High level – global • Low level – local
Related Work • Helbing’s Social Forces model • Particle simulations , Oscillations • Extensions exist – real-time problems • Rule-based models, i.e. Reynold’s • Realistic, for low-medium density • Avoid individual contacts
Related Work • Cellular Automota models • No contact between agents • Higher level navigation • Roadmaps • Potential Fields • Cell and portal graphs
High Level Module Modeling Crowd and Trained Leader Behavior during Building Evacuation, by Pelechano and Badler. (2006)
Low Level Module • Prevent oscillations • Create bi-directional flows • Queueing • Pushing • Agents falling and act as obstacles • Propogate panic • Exhibit impatience • React to dynamic changes
Low Level Module • Movement of an agent
Low Level Module • Then, position is: • α : agent will move or be pushed • v : velocity ( <= Vmax), constant a • β : priority value to avoid fallen agents • r : result of repulsive forces • T : time step
Forces:Avoidance • D : viewing rectangle • Increase/decrease based on density • Weights: • d: distance between agents • o: orientation of velocity vector
Forces: Avoidance • Bi-directional flows with right preference and altering rectangle of influence
Forces: Repulsion • λ : Priority value between agents and walls/obstacles • Walls > Agents
Shaking Problem • Stop moving if: • Agent is not in panic • Repulsion against the agent • Can still be pushed forward.
Waiting Behaviour • Allows queueing • Disk of influence • Depends on desired behaviour
Pushing Behaviour • Personal space (disk) • I.e. Low for impatient agent • Apply collision response force
Falling Agents • When pushing forces are high • Becomes an obstacle • No repulsive force
Panic Propagation • High-level module • Communication between agents • Low-level module • Agent detects density or pushing
Dynamic changes and bottlenecks • High-level module • Supply alternative paths
Results • 85 room environment • Simulation only: • 25 fps • 1800 characters • Simulation and 3D rendering • 25 fps • 600 simple 3d human figures
Conclusions • Ability to simulate low-high density • Panic and calm situations • New and natural behaviours • Pushing, queueing, falling agents... • User needs to define parameters for different environments/situations
Assesments – The paper • Local methods/behaviours • Clear explanation • Supported with figures and results • Experiments & Results • Rather scattered • One or few comparative tests • Could be more
Assesments – The method • No problems with the model? • Behaviours and the model depend also on high-level module • Limited adaptability • Gaps in the method explanation
Assesments – The method • Performance • 25 fps, 600 human figures • Enough for simulations and/or games? • Applicability • Rather limited • Would serve for industrial applications
Assesments – The method • Incorporate global and local approach • Natural in high density • Individual contacts/interactions • Globay wayfinding • Shortest path • Maybe deliver another approach • Roadmaps, corridor maps
Assesments – The method • Lacks prediction/anticipation • APredictiveCollisionAvoidanceModelforPedestrianSimulation, Karamouzas et al.(2009) • Able to handle high density • Morphable Crowds, Eunjung Ju et al. (2010) • Integration of a personality model • How the Ocean Personality Model Affects the Perception of Crowds, F. Durupinar et al. ( 2011)