Download
1 / 25
250 likes | 385 Vues
This paper presents a novel probabilistic framework for feature point matching aimed at addressing inter-frame correspondence of points of interest. The method models changes in feature appearance as a stochastic process, enhancing previous techniques that relied on simplified assumptions. By leveraging a Gaussian Mixture Model, the algorithm accommodates complex changes in appearance and noise. Results demonstrate improved accuracy in tracking and other applications, such as stereo and motion segmentation. Future work will explore optimizing the algorithm for computational efficiency.

E N D
Probabilistic Framework for Feature-point Matching Ron Tal, Minas E. Spetsakis York University
Outline • Introduction • Probabilistic Framework • Theoretical Validation • Our Algorithm • Results • Discussion
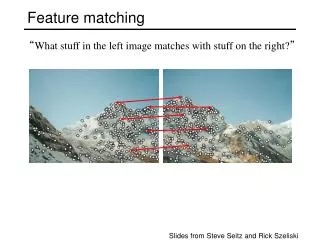
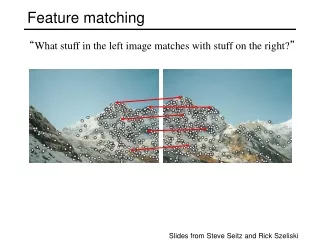
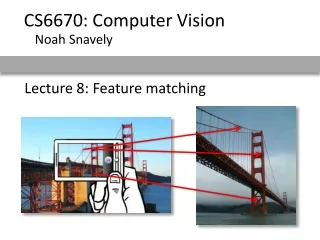
Introduction: The Problem • To determine inter-frame correspondence of points of interest • Applications include: • Tracking • Stereo • Motion Segmentation • Structure from Motion • Etc.
Introduction: Previous Approaches • Modeling optic flow as a set of linear constraints under simplified assumptions like: • Brightness constancy • Small motion • Smoothness • Lucas & Kanade, Horn & Schunk, etc. • Expanding the linear model in order to relax assumptions • Negahdaripour, GDIM, etc.
Introduction: Previous Approaches (cont.) • Modeling violations to the assumptions as ‘outliers’ and applying a framework of robust M-estimation • Black & Anandan • Handling larger motion using hierarchical application • Bergen et al., etc. • Enhanced parametric model, along with estimation • Jepson & Black using the EM to model multiple motions • Wills et al. use RANSAC, etc.
Probabilistic Framework: Rationale • A probabilistic model that associates feature appearance to its location in the image • Compute the probability of its location given its appearance and previous image(s) • Maximize this probability to get our answer • Parameters of the probabilistic model can be “learned”
Probabilistic Framework: In a Nutshell • Changes to feature appearance across frames can be modeled as a stochastic process
Probabilistic Framework: In a Nutshell • We can thus define the pdf that relates feature position given its appearance: • Where: • - Image appearance • - Statistical model of change in appearance • - Feature position • - Pixel values around the feature-point
Probabilistic Framework: In a Nutshell • Using Bayes’ Law, it becomes: • The denominator is constant with respect to position in the second frame • We thus determine the position by maximizing its joint probability with image appearance
Theoretical Validation: Recall the Classics • A very popular early solution to the problem has been given by Lucas & Kanade: • Assumptions include: • Small isotropicly distributed motion • Brightness constancy • Image noise is i.i.d
Theoretical Validation: Our Framework • Assuming uncertainty is isotropic and normal: becomes: • The covariance matrix can be partitioned:
Theoretical Validation: Our Framework • By performing inversion by partitioning and minimizing: • Applying Taylor approximation and the Woodbury identity:
Theoretical Validation: Our Framework • Substituting: • Since:
Theoretical Validation: Our Framework • We get:
Our Algorithm: Increasing Expressiveness • We want to relax as many assumptions as possible • We need to be able to model more complex changes to image appearance • A Gaussian Mixture Model can be used to approximate any pdf:
Our Algorithm: Increasing Expressiveness • Using a statistical noise model, we generate random samples that correspond to changes in image appearance due motion and sources of uncertainty • Using the EM Clustering algorithm, we approximate a GMM: 2 Components 3 Components
Our Algorithm: Noise Model • Random observations are synthesized using a noise model • Changes to image appearance modeled include, but not limited to: • The motion we want to determine • Sub-pixel jitter • Electronic camera noise • Brightness fluctuations
Results: Quantitative Evaluation • We select feature-points from the Middlebury Sequence exhibiting small to medium motion (5 pix ) • Additionally, we introduce i.i.d camera noise as well as global change of illumination • The performance of our method is compared with Hierarchical Horn & Schunk (red) and Black and Anandan (green)
Results: Qualitative Evaluation • Feature-point correspondence over multiple frames from handheld captured highway data • Example, point-tracking over 10 frames:
Results: Qualitative Evaluation • Result: 5 pix drift, overall motion is 38 pix • Single frame motion varies from 0.1 pix to 13 pix
Discussion: Performance • Framework shows great promise • Performs well under relaxed statistical assumptions • Algorithm can be easily customized for specific applications
Discussion: Performance Trade-offs • Increased accuracy of algorithm requires more generated samples and more components for the GMM • The cost is longer computational time for each iteration of EM • Correspondence of a single feature-point is insufficient for robust object tracking
Discussion: Future Work • Modification of GMM estimation to incorporate additional information and reduce the number of observations needed • Re-use pdf computed in previous frames to reduce computational cost • A tracker based on clustering of multiple feature-points using an affine motion model • Migration from MATLAB to OpenCV