Download
1 / 70
700 likes | 1.04k Vues
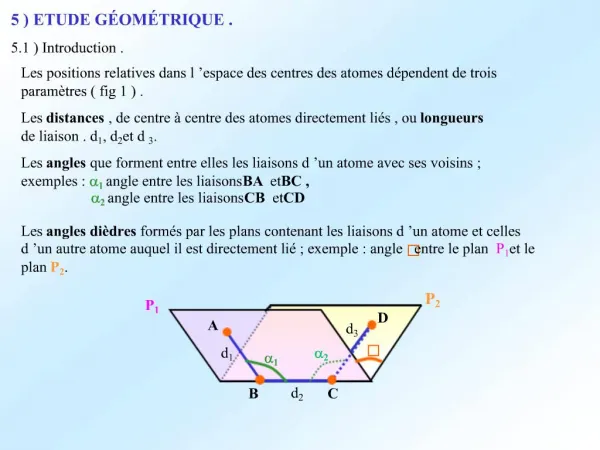
Objectifs. Prsentation de techniques non-dterministes pour la modlisation et le calcul des variations gomtriques;Complmentarit avec les techniques de calcul des tolrances (arithmtiques ou au pire des cas);Prsentation de travaux de recherche antrieurs ou en cours autour du thme; Princi

E N D
1. Mod�lisation g�om�trique des syst�mes poly-articul�s Approches statistiques et techniques de simulation Monte-Carlo
Nabil ANWER - MCF
LURPA/ENS Cachan
Universit� Paris Nord 13
anwer@lurpa.ens-cachan.fr
2. Objectifs Pr�sentation de techniques non-d�terministes pour la mod�lisation et le calcul des variations g�om�triques;
Compl�mentarit� avec les techniques de calcul des tol�rances (arithm�tiques ou au pire des cas);
Pr�sentation de travaux de recherche ant�rieurs ou en cours autour du th�me;
Principe de calcul de logiciels commerciaux (Tolmate, CeTol, �);
M�thodes pour l�analyse des erreurs cin�matiques.
3. Variations g�om�triques des pi�ces m�caniques (r�partition des caract�ristiques) Comportement statistique
d�une sp�cification (lot de pi�ces) Comportement statistique d�une sp�cification (pi�ce)
4. Variations g�om�triques des pi�ces m�caniques (r�partition des caract�ristiques)
5. Variations g�om�triques des ensembles m�caniques (position d�un point, jeu)
6. Techniques de r�solution
7. Rappels de statistiques
8. Introduction Statistiques
D�crivent des populations
Estiment des param�tres
Testent des hypoth�ses
Statistiques descriptives
Visent � explorer les donn�es et � en tirer un certain nombre de mesures et d'indices, ou des repr�sentations graphiques
Variables al�atoires
Probabilit�s et lois de distribution
9. Statistiques descriptives Vocabulaire :
Population : Ensemble des objets de l��tude (pi�ces m�caniques)
Individu : �l�ment de la population (pi�ce m�canique)
�chantillon : Partie de la population
Taille : Nombre d��individus dans la population/�chantillon
Variable : Application associant � chaque individu un caract�re (valeur d�une cote mesur�e).
On associe � un caract�re une variable statistique X qui donne la valeur du caract�re pour un individu ( ex : la variable X donne la taille d'un �l�ve; la variable Y donne le poids d'un �l�ve)
Variables qualitatives Vs. Variables quantitatives
10. �tude d��une variable Effectifs et Fr�quences
n : taille de la population
xi : i-�me modalit� de la variable X
ni : nombre d��individus ayant xi comme modalit� (effectif de la modalit� xi)
fi : fr�quence de la modalit� xi (fi = ni/n)
Pour un caract�re donn� une population peut �tre r�partie en classes
Le centre d'une classe [ai, ai+1[ est la valeur (ai + ai+1)/2
ex : le centre de la classe [150, 170[ est (150 + 170)/2 = 320/2 = 160
L'amplitude d'une classe [ai, ai+1[ est (ai+1 - ai)
11. Combien de classes doit-on r�aliser ? Absence de r�gles universelles, solutions empiriques et pragmatiques.
l'objectif est de conserver � la distribution sa forme g�n�rale
Crit�re de Brooks-Carruthers, le nombre de classes Kt :
Kt < 5 log10 n
Crit�re de Huntsberger-Sturges, le nombre de classes Kt :
Kt = 1 + (10 log10 n)/3
Formule empirique :
Intervalle de classe ht :
Wt = Xmax - Xmin (�tendue)
ht = Wt/Kt
12. Exemple
13. Param�tres caract�ristiques
14. Variables al�atoires Une variable al�atoire X est une variable qui prend ses valeurs au hasard parmi un ensemble de n valeurs possibles (n fini ou infini).
Une valeur particuli�re de X est d�sign�e par xi
n valeurs x1, x2, x3, ... , xn d��une variable al�atoire X peuvent �tre caract�ris�es par :
15. Loi de distribution d�une variable al�atoire continue Densit� de probabilit� :
Propri�t�s :
16. Exemples de distributions Distribution Normale : Distribution Uniforme :
17. Moyenne et �cart-type (Estimation) Dans la pratique, m et s d�une variable al�atoire X sont rarement connus. Ils sont estim�s � partir des observations dont on dispose sur un �chantillon.
18. Th�or�me de la limite centrale La moyenne d��une variable al�atoire X calcul�e sur des �chantillons de m�me taille n est une variable al�atoire not�e
19. Th�or�me de la limite centrale Illustration par l�exemple (10000 essais)
20. Comment lier les variations g�om�triques aux distributions statistiques ? Hypoth�se :
Connaissance � priori de la distribution sous-jacente
Limites :
Forte hypoth�se de normalit� (mythe de la loi normale)
Tests de normalit� pas souvent effectu�es
Mod�le utilis� :
t=ks
t : caract�ristique observ�e ou mesur�e (ex. tol�rance, jeu, position d�un point, variable articulaire)
: �cart-type de la distribution sous-jacente
k : coefficient qui d�pend de la nature de la distribution et de la proportion d�acceptation en g�n�ral 99,73% (approche 6s) (risque)
21. Lien fort avec les capabilit�s : point de vue MSP
22. Capabilit�s : court terme vs. long terme
23. Capabilit�s : indices
24. Tol�rancement statistique Am�lioration du mod�le arithm�tique
25. �tude d�un m�canisme �l�mentaire
26. M�thode au pire des cas Forme mini-maxi :
a � ( b + c+ d + e + f ) + (ta + tb + tc + td + te + tf )/2 ? X maxi
a � (b + c+ d + e + f) - (ta + tb + tc + td + te + tf)/2 ? X mini.
Forme moyenne et IT :
a � ( b + c+ d + e + f) = X moyen
ta + tb + tc + td + te + tf ? ITx
Les valeurs encadr�es a, b, c, d, e, f sont suppos�es connues. La condition � respecter ne concerne que les tol�rances.
Application num�rique :
la r�partition uniforme des tol�rances (ta = tb = �) donne :
ta = tb = tc = td = te = tf = ITx /6 = 0,12/6 = 0,02.
27. Synth�se sur les m�thodes au pire des cas Il est peu probable que les pi�ces soient aux limites des tol�rances et que toutes les pi�ces soient maximales/minimales en m�me temps.
En milieu industriel, l�approche au pire des cas est jug�e trop s�v�re, des m�thode statistiques sont utilis�es d�s que le nombre de pi�ces de la cha�ne de cotes devient important.
Les m�thodes statistiques de r�partition des tol�rances des m�thodes de calculs pr�visionnels (le tol�rancement statistique se fait en bureau d'�tudes, bien avant que les fabricants ne r�alisent les pi�ces).
Il n�est donc pas toujours possible de tenir compte des r�sultats de production pour faire des optimisations (approches robustes).
28. Mod�les statistiques
29. Mod�les statistiques
30. Calcul
31. Conclusions
32. Prise en compte du d�centrage
33. Autres mod�les (Anselmetti)
34. Mod�le g�n�rale pour le tol�rancement statistique De nombreuses conditions fonctionnelles s'�crivent comme combinaison lin�aire des composantes ind�pendantes :
Les coefficients ai peuvent �tre dus � une sym�trie, � une projection ou � un effet de bras de levier�
En g�n�ral,
35. Probl�me de l�ind�pendance La condition d'ind�pendance n'est pas toujours v�rifi�e :
- Assemblage comportant deux pi�ces identiques tir�es du m�me lot (deux entretoises ou deux flasques de chaque c�t� d'un m�canisme sym�trique, plaque tir�es dans la m�me t�le�).
- Pi�ces sym�triques issues du m�me moule (s'il y a un �cart de fermeture du moule, les deux pi�ces subiront la m�me variation).
- Influence d'un param�tre ext�rieur qui modifie la dimension des pi�ces (usure, temp�rature, d�formation...).
Liens dus au processus de fabrication (deux gorges identiques r�alis�es par le m�me outil, usinage en commande num�rique avec le m�me outil, m�me montage d'assemblage...).
36. Influence de plusieurs sp�cifications sur une m�me pi�ce
37. Prise en compte des contacts
38. Conclusions Le tol�rancement statistique permet une r�duction consid�rable des co�ts.
Les mod�les statistiques se basent sur des hypoth�ses fortes de pseudo-normalit� et manquent de formalisme rigoureux.
Le cas de variables ind�pendantes est tr�s souvent rencontr�s en milieu industriel.
La superposition de plusieurs sp�cifications rend le probl�me plus complexe.
La prise en compte des contacts se base sur des approches exp�rimentales pour lesquelles les identifications de mod�les sont � am�liorer.
Le bouclage contr�le/fabrication/conception est le seul moyen de garantir la robustesse et l�optimum.
Il reste � int�grer les aspects 3D (tol�rancement statistique radial)
La caract�risation statistique des zones de tol�rances � travers les travaux en g�om�trie probabiliste et en simulation est une nouvelle alternative.
39. Caract�risation statistique des d�fauts Apports de la m�trologie
Apports des techniques de simulation
40. Caract�risation statistique des d�fauts
41. Caract�risation statistique des d�fauts
42. Approches de simulation Techniques de monte carlo
43. Pr�sentation de la m�thode Exemple illustratif
44. Pr�sentation de la m�thode Estimation de
Soit p(u) une fonction de densit� de probabilit� uniforme sur [a, b]
Soit Ui la i �me variable al�atoire uniforme de densit� p(u)
Alors, si n est grand :
45. Principe de simulation monte carlo Principe
Pour effectuer des simulations probabilistes sur ordinateur, on utilise un g�n�rateur de nombres pseudo-al�atoires (une suite (xn)n de nombres r�els compris entre 0 et 1) qui imitent une r�alisation d'une suite de variables al�atoires ind�pendantes et identiquement distribu�es suivant la loi uniforme sur [0;1].
Loi uniforme sur [a,b]
Si U est une variable uniforme sur [0;1] alors
Loi normale N(m,s)
Si U1 et U2 sont deux variables uniformes ind�pendantes sur [0;1] alors
46. Approches � base de simulation Tirage al�atoire de caract�ristiques
Connaissance � priori des distributions des caract�ristiques (point, droite, plan)
Estimation de la r�sultante
Utilisation de logiciels statistiques (Minitab)
47. Analyse statistique des zones de tol�rances
48. Analyse statistique des zones de tol�rances
51. Statistiques sur la normale
52. Empilage de pi�ces 2D
53. Analyse statistique des zones de tol�rances
54. Analyse statistique des zones de tol�rances
58. Analyse statistique des zones de tol�rances
59. Analyse statistique des zones de tol�rances
60. Position Error in Assemblies and Mechanisms Travaux de Jonathan Wittwer
61. Position Error in Assemblies
62. Direct Linearization (DLM) [That is � the Direct Linearization Method, or DLM]
It�s a good thing this session is before lunch, or these next few slides would put you all to sleep.
This method is based upon finding the sensitivities of the various parameters on the output error.
First, we start with the closed loop and expand it into two equations � the summation of the vector components in the x and y directions.
This is a nonlinear system of equations since the unknown variables are theta 3 and theta 4.
However, we can linearize them by taking a taylor�s series expansion and dropping higher order terms.
X is a vector of primary random variables and U is a vector secondary random variables.
A and B are matrices of partial derivatives.
We then solve for the variations in the unknown variables.
We could stop here if all we wanted to know was the variation in angles theta 3 or theta 4[That is � the Direct Linearization Method, or DLM]
It�s a good thing this session is before lunch, or these next few slides would put you all to sleep.
This method is based upon finding the sensitivities of the various parameters on the output error.
First, we start with the closed loop and expand it into two equations � the summation of the vector components in the x and y directions.
This is a nonlinear system of equations since the unknown variables are theta 3 and theta 4.
However, we can linearize them by taking a taylor�s series expansion and dropping higher order terms.
X is a vector of primary random variables and U is a vector secondary random variables.
A and B are matrices of partial derivatives.
We then solve for the variations in the unknown variables.
We could stop here if all we wanted to know was the variation in angles theta 3 or theta 4
63. Solving for Assembly Variation But that would be too easy, so we need to include the open loop equation also.
Here, we expand the open loop equation to describe the position of the point on our mechanism.
We then take the taylor�s expansion of the open loop equations, substitute in for the secondary variables, perform a little linear algebra magic,
And wallah, we have the position variation in terms of a friendly sensitivity matrix and our known variables.
The sensitivity matrix can then be used to obtain both deterministic and probabilistic results.But that would be too easy, so we need to include the open loop equation also.
Here, we expand the open loop equation to describe the position of the point on our mechanism.
We then take the taylor�s expansion of the open loop equations, substitute in for the secondary variables, perform a little linear algebra magic,
And wallah, we have the position variation in terms of a friendly sensitivity matrix and our known variables.
The sensitivity matrix can then be used to obtain both deterministic and probabilistic results.
64. Worst-Case vs. Statistical These equations are somewhat familiar � they are just another way of writing the equations that Dr. Chase presented in his presentation this morning.
For the worst-case situation, the error is simply the sum of the tolerances multiplied by the magnitude of their respective sensitivities.
For statistical cases, the error is the root sum square.These equations are somewhat familiar � they are just another way of writing the equations that Dr. Chase presented in his presentation this morning.
For the worst-case situation, the error is simply the sum of the tolerances multiplied by the magnitude of their respective sensitivities.
For statistical cases, the error is the root sum square.
65. Deterministic Methods: Worst-Case Direct Linearization:
Uses the methods just discussed.
Vertex Analysis:
Finds the position error using all combinations of extreme tolerance values.
Optimization:
Determines the maximum error using tolerances as constraints. Here, this is a little better. Less math, but more words.
In order to validate the worst-case direct linearization method, it will be compared to two other deterministic methods: Vertex analysis and Optimization.
The vertex analysis finds �
[This kind of analysis is usually used to validate other worst-case approaches. For every set of initial conditions, the set of nonlinear equations is solved. Although the results of a vertex analysis are often used in statistical studies, the data itself is deterministic because it is based on fixed tolerance values.]
Optimization determines�
The optimization routine ideally searches out the whole design space to discover the absolute maximum error.
The third method is to use Optimization to determine �
Using an optimization that searches the whole design space is the ultimate test of worst-case deterministic methods ]Here, this is a little better. Less math, but more words.
In order to validate the worst-case direct linearization method, it will be compared to two other deterministic methods: Vertex analysis and Optimization.
The vertex analysis finds �
[This kind of analysis is usually used to validate other worst-case approaches. For every set of initial conditions, the set of nonlinear equations is solved. Although the results of a vertex analysis are often used in statistical studies, the data itself is deterministic because it is based on fixed tolerance values.]
Optimization determines�
The optimization routine ideally searches out the whole design space to discover the absolute maximum error.
The third method is to use Optimization to determine �
Using an optimization that searches the whole design space is the ultimate test of worst-case deterministic methods ]
66. Deterministic Results So, when we look at the results for the position error of a mechanism, it is important to compare these different methods.
This graph represents the position error for the 4-bar at a given configuration using deterministic methods, where the path slope is shown by this blue line.
The dots are the results of the vertex analysis
The dashed box is the result of the W-C DLM analysis
The Star is the result of the optimization routine.
First, our optimization routine did not find a way out of the room. In other words, the actual absolute maximum error corresponds to one of the vertex points.
The amount that the vertex points and optimization are outside the worst-case �box� represents the error in linearizing the equations.
The Worst Case DLM seems very conservative in some places, especially since the vertex points seem to be clustered around a slope of 45 degrees.So, when we look at the results for the position error of a mechanism, it is important to compare these different methods.
This graph represents the position error for the 4-bar at a given configuration using deterministic methods, where the path slope is shown by this blue line.
The dots are the results of the vertex analysis
The dashed box is the result of the W-C DLM analysis
The Star is the result of the optimization routine.
First, our optimization routine did not find a way out of the room. In other words, the actual absolute maximum error corresponds to one of the vertex points.
The amount that the vertex points and optimization are outside the worst-case �box� represents the error in linearizing the equations.
The Worst Case DLM seems very conservative in some places, especially since the vertex points seem to be clustered around a slope of 45 degrees.
67. Statistical Methods Monte Carlo Simulation
Thousands to millions of individual models are created by randomly choosing the values for the random variables.
Direct Linearization: RSS
Uses the methods discussed previously.
Bivariate DLM
Statistical method for position error where x and y error are not independent. Now we come to the statistical methods:
First, a very common method is Monte Carlo Simulation, where thousands �
This method is the statistical corollary to the Vertex Analysis method. Instead of fixed values for the tolerances, the variables are chosen randomly based upon a given probability density function (such as uniform or normal). The model is then solved using some nonlinear solver.
The second method is the Root-Sum-Square direct linearization methods, where the position �
This method is the statistical corollary to the Worst-Case DLM method, where standard deviations are used instead of tolerance limits.
Third is the bivariate DLM method. This is a statistical �.
This is what I�d call the optimum statistical method for determining position error. It ends up being the best description of the actual error zone.Now we come to the statistical methods:
First, a very common method is Monte Carlo Simulation, where thousands �
This method is the statistical corollary to the Vertex Analysis method. Instead of fixed values for the tolerances, the variables are chosen randomly based upon a given probability density function (such as uniform or normal). The model is then solved using some nonlinear solver.
The second method is the Root-Sum-Square direct linearization methods, where the position �
This method is the statistical corollary to the Worst-Case DLM method, where standard deviations are used instead of tolerance limits.
Third is the bivariate DLM method. This is a statistical �.
This is what I�d call the optimum statistical method for determining position error. It ends up being the best description of the actual error zone.
68. Bivariate Normal Position Error The key to using the bivariate distribution is to analyze the assembly variances, including the correlation between the x and y position variance.
Vx is the variance in the x-direction
Vy is the variance in the y-direction
Vxy is the covariance, where the sensitivities are combined in this manner.
These variances form a symmetric matrix, or variance tensor. The eigenvalues of this tensor are the principle variances that represent the major and minor diameters of the ellipse. The angular rotation of the ellipse can also be determined.
The key to using the bivariate distribution is to analyze the assembly variances, including the correlation between the x and y position variance.
Vx is the variance in the x-direction
Vy is the variance in the y-direction
Vxy is the covariance, where the sensitivities are combined in this manner.
These variances form a symmetric matrix, or variance tensor. The eigenvalues of this tensor are the principle variances that represent the major and minor diameters of the ellipse. The angular rotation of the ellipse can also be determined.
69. Statistical Method Results The result is an elliptic position zone oriented at some angle.
The mass of little x�s is the result of Monte Carlo
The ellipse is the result of the bivariate model
The box is the result of the RSS DLM method.
So, what significance can you see from this graph?
Notice that the bivariate model is verified by the Monte Carlo results.
The DLM statistical method without considering the correlation between x and y results in a box.
The 3-sigma tolerance zone is most closely approximated using the bivariate model, whereas the straight R.S.S. method is more conservative.
It turns out that Red box represents a true 3-sigma, while the ellipse slightly underpredicts it. This was found by comparison to Monte Carlo. After 100,000 points, the ellipse contained 98.84% and the Box contained 99.73%.The result is an elliptic position zone oriented at some angle.
The mass of little x�s is the result of Monte Carlo
The ellipse is the result of the bivariate model
The box is the result of the RSS DLM method.
So, what significance can you see from this graph?
Notice that the bivariate model is verified by the Monte Carlo results.
The DLM statistical method without considering the correlation between x and y results in a box.
The 3-sigma tolerance zone is most closely approximated using the bivariate model, whereas the straight R.S.S. method is more conservative.
It turns out that Red box represents a true 3-sigma, while the ellipse slightly underpredicts it. This was found by comparison to Monte Carlo. After 100,000 points, the ellipse contained 98.84% and the Box contained 99.73%.
70. Comparison of both deterministic and probabilistic methods. Here is an example of how the maximum normal position error varies for one complete revolution of a four-bar crank.
This plot which analyzes the mechanism at 100 different points was generated in seconds.
Here is an example of how the maximum normal position error varies for one complete revolution of a four-bar crank.
This plot which analyzes the mechanism at 100 different points was generated in seconds.
71. Benefits of Bivariate DLM Accurate representation of the error zone.
Easily automated. CE/TOL already uses the method for assemblies.
Extremely efficient compared to Monte Carlo and Vertex Analysis.
Can be used as a substitute for worst-case methods by using a large sigma-level First, �.
Second, �.
Fourth, �.
AND this is as far as I�ve gotten so far, so there�s not much of a conclusion.First, �.
Second, �.
Fourth, �.
AND this is as far as I�ve gotten so far, so there�s not much of a conclusion.