Download
1 / 23
230 likes | 343 Vues
This paper discusses innovative methods for discrete curve and surface evolution, highlighting their robustness against noise and ability to preserve positional accuracy without blurring. It focuses on curve evolution techniques such as extraction of linear segments and maximal convex arcs for shape similarity retrieval in image databases, along with applications in video analysis for key frame detection and unpredictable event identification. The effectiveness of these techniques is evaluated through various case studies, including the analysis of video sequences and surface evolution via knot removal in radial basis spline representations.

E N D
Discrete Approach to Curve and Surface Evolution Longin Jan Latecki Dept. of Computer and Information Science Temple University Philadelphia Email: latecki@temple.edu
Discrete Curve Evolution P=P0, ..., PmPi+1 is obtained from Pi by deleting the vertices of Pi that have minimal relevance measure K(v, Pi) = K(u,v,w) = |d(u,v)+d(v,w)-d(u,w)| v v w w u u
Discrete Curve Evolution: Preservation of position, no blurring
Parts of Visual Form (Siddiqi, Tresness, and Kimia 1996) = maximal convex arcs
Discete Cureve Evolution is used in shape similarity retrieval in image databases
Shape similarity measure based on correspondence of visual parts
A video sequence is mapped to a trajectory in a high dimensional space,e.g. by mapping each frame to a feature vector in R37Discrete curve evolution allows us to determine key frames
2379 vertices 20 vertices Trajectory Simplification
The 10 most relevant frames in Mr. Beanwww.videokeyframes.de
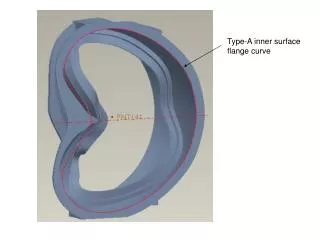
Discrete Surface Evolution: repeated removal of least relevant vertices
(Lyche and Morken in late 80s): Surface patch f:R2 -> R is represented with radial base splines Sgiven a set of knots T:||f – G(T)(f)|| = min{||f - g||: g in S}Surface evolution by knot removalRelevance measure of the knot:r(t) = ||f – G(T – {t})(f)||