Building Stereo Tiled Display Walls using Linux
This presentation discusses the development and implementation of stereo tiled display walls using Linux at Boston University. It covers the advantages of using Linux for large-format displays, highlights the BU Deep Vision Display Wall, and compares active versus passive stereoscopic systems. Key topics include hardware and software requirements, implementation and maintenance issues, resources, and ongoing projects. The presentation aims to demonstrate how these systems provide scalable resolution, enhanced graphics performance, and cost-efficient solutions for visualization in scientific computing.

Building Stereo Tiled Display Walls using Linux
E N D
Presentation Transcript
Building Stereo Tiled Display Walls using Linux Ray Gasser, rayg@bu.edu Graphics Programmer/Analyst Scientific Computing and Visualization Group Boston University
Introduction Agenda • Why Linux/Display Wall? • BU Deep Vision Display Wall • Stereo (Active vs. Passive) • Hardware • Software • Implementation Issues • Maintenance Issues • Resources • Current Projects • Conclusions
Why Linux/Display Wall? Fakespace ImmersaDeskR2 Screen: rigid 6'w x 4'h Projection System: 1 8" CRT w stereoscopic enhancement Resolution (fixed): 1280 x 1024 @ 120 Hz (1600 x 1200 opt) Lumens: 250 Footprint 6.4'w x 7'd x 7.5'h Stereo: Active Cost: $139,000 (includes Ascension space pad with wand+head and 5 pair shutter glasses) http://www.fakespacesystems.com/workdesk1.shtml
Why Linux/Display Wall? Boston University Deep Vision Display Wall v1.0 Screen: flexible 10'w x 7'h Projection System: 8 LCD commodity XGA projectors Resolution (scalable): 2048 x 1536 aggregate stereo @ 75 Hz Lumens: 2000+ (2 overlapping projectors 2000 lumens each per tile) Footprint 10.5'w x 12'd x 7.5'h Stereo: Passive Cost: $50,000 (of which 40k is for the 8 projectors) (80k for everything including Linux cluster) http://scv.bu.edu/Wall
Why Linux/Display Wall? • Large Format Display • High Resolution / Scalable Resolution • Scalable graphics performance (rendering cluster) • Multiple displays within wall • Bright • Low cost / Scalable cost
BU Deep Vision Display Wall v1.0 (first public showing SC2001 Nov 10-16, 2001) • 10'w x 7.5'h rear projected display screen • 2x2 stereo array (8 LCD XGA projectors) • 2048x1536 aggregate stereo screen resolution • 4 Linux render nodes + one control/application node • each render node drives 2 projectors • Passive stereo using linear polarizing glasses/filters • Fast Ethernet interconnect http://scv.bu.edu/Wall
BU Deep Vision Display Wall v2.0 (under construction) • 15'w x 8'h rear projected display screen • 4x3 stereo array (24 LCD XGA projectors) • 4096x2304 aggregate stereo screen resolution • 24 Linux render nodes + 1 control node • each render node drives 1 projector • 52 Linux compute nodes • Passive stereo using linear polarizing glasses/filters • Myrinet interconnect
Stereo (active vs. passive) Active Stereo • Pros • only one projector per tile (easier alignment) • no special screen material needed • Cons • expensive • shutter glasses • high refresh CRT projectors • requires quad buffer support on video card/drivers • requires framelock/genlock (hardware or software) • possible eye strain (splitting refresh rate between eyes)
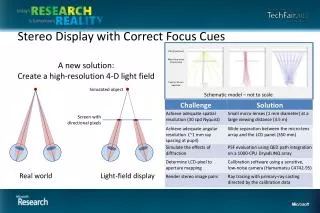
Stereo (active vs. passive) Passive Stereo • Pros • inexpensive • polarizing filters • polarizing glasses • LCD/DLP projectors • glasses robust • don't need Quad buffers • don't need framelock/genlock • less eye strain (full refresh rate for each eye) • Cons • two projectors per tile • alignment issues • space issues • need special non-depolarizing screen
Passive Stereo Linear Polarizing Filters • Pros • inexpensive • more light • Cons • limited head movement (cross talk) • ok for walls, bad for CAVEs Circular Polarizing Filters (linear + wave retarder) • Pros • unlimited head movement (still need head tracking) • Cons • more expensive • less light
Hardware: Screen • front vs. rear projection • non depolarizing for passive stereo • rigid vs. flexible • Fresnel/Lenticular • transmission properties • http://www.evl.uic.edu/pape/papers/lowcost.spie02/node5.html • viewing angle • Gain • mounting hardware • portability
Hardware: Projectors • LCD vs. DLP vs. CRT • Image Quality • Color • calibration • convergence • uniformity • gamut • Resolution • Inputs • DVI • VGA • svideo • Polarization Issues
Hardware: Projectors • Brightness • Controls • interface • tethered remote • serial • tcp/ip • documentation of control codes • calibration and configuration • accuracy • Stability (zoom, focus) • Refresh Rate • Weight • Size
Hardware: Projectors • Bulbs • life-time • greatest maintenance expense • warranty • color • Advanced Features • lens shifting • image warping • frame buffer access • microprocessor access • stacking
Hardware: Video Cards • Display Channels • number • DVI vs. VGA • Framelock/Genlock • Quad buffers (active stereo) • Fully accelerated OpenGL • Linux driver support
Hardware: PC Clusters • Render • Compute • Control • Processors • 32 bit (Intel XEON, Intel Pentium4, AMD Athlon) • 64 bit coming (Intel Itanium2, AMD Opteron) • Cache L1, L2 • number (realtime needs 2)
Hardware: PC Clusters • I/O • AGP 3.0 bus (2x/4x/8x) 2.1 GB/s bandwidth • ATA/100, Ultra 160 SCSI, Ultra 320 SCSI • System Bus: 133MHz, 400MHz • Memory • DDR SDRAM • RDRAM (dual-channel) • Kernel supports up to 64GB of physical memory
Hardware: Network/Interconnect • Ethernet Switch • 100BaseT (Fast Ethernet) • 10 MB/sec (100Mb/sec) • Gigabit Ethernet • Typically delivers 30-60 MB/sec • 100-1000 microsecond latency • 10 Gigabit • latest • possible replacement for Myrinet • Myrinet 2000 • 200 MB/sec • 10-15 microsecond latency • scales to 1000’s of nodes • ~30% of total cost
Hardware: User Interface • Head/user tracking • radio/accelerometers • video tracking • Ascension spacepad • $1600.00 • needs isa slot • 6 DOF mice • Ascension Flock of Birds • handheld computer • VRCO trackd (software) http://www.ascension-tech.com
Hardware: Mounting/Alignment • 6 DOF adjusters • independent control • stepper motor/ remote control • auto alignment • camera feedback loop • image warp • http://www.merl.com/projects/ProjectorCalib ANL Positioner
Hardware: Audio • Covered in later session
Software: Cluster Administration • Kickstart • RedHat network installer • xCAT • utilities for cluster monitoring, remote execution, installation, etc • IBM commercial product • http://x-cat.org • PerformanceCo-Pilot • System level performance monitoring • http://oss.sgi.com/projects/pcp/ • Batch • OpenPBS • http://www.openpbs.org • LSF • http://www.platform.com/products/clusterware
Software: System (multi-display) • WireGL/Chromium • VRJuggler, NetJuggler • CaveLib, trackd • Syzygy • softGenlock http://graphics.stanford.edu/software/wiregl http://sourceforge.net/projects/chromium http://graphics.stanford.edu/~humper http://www.vrjuggler.org http://www.vrco.com/products/cavelib/cavelib.html http://www.isl.uiuc.edu/ClusteredVR/ClusteredVR.htm http://netjuggler.sourceforge.net http://netjuggler.sourceforge.net/SoftGenLock.php
Software: Graphic APIs and Libraries • OpenGL • Open Inventor • OpenGL Performer v2.5 • Kitware VTK http://www.sgi.com/software/opengl http://oss.sgi.com/projects/inventor http://www.tgs.com http://www.sgi.com/software/performer http://www.kitware.com
Software: Development • Covered in later session
Software: Tools • Tiled Window Managers • NCSA • MoviePlayers • NCSA Pixel Blaster • Argonne Movie Player • Synchronization Libraries • Communication Libraries (DAFFIE) • http://www.ncsa.uiuc.edu/TechFocus/Deployment/DBox • http://scv.bu.edu/SCV/DAFFIE
Software: Application design • Multi-channel • local compute/local render • IR multi-channel • Clent/Server • local compute/distributed render • WireGL/Chromium • Master/Slave • distributed compute/distributed render (mixed compute/render) • Syzygy, VRJuggler, Performer + synchronization
Implementation Issues • Type of Stereo (active vs. passive) • Type of Projection (front vs. rear) • Projector Control • Projector Mounts • Projector Alignment • Projector Color and Luminosity Matching • Luminosity Falloff within a tile • software computation of inverse filter applied during rendering • Edge Blending
Implementation Issues • Physical Space • projector -> projector • projector -> screen Airflow • Cooling • Light • leaks • ambient • Power • Head tracking
Maintenance Issues • Alignment • Color and Luminosity Matching • Power Down • Bulb usage
Resources • Stereo • http://www.stereoscopy.com/links/index.html • http://www.stereographics.com/homepage/frame-wp.html • http://astronomy.swin.edu.au/~pbourke/stereographics • Walls http://scv.bu.edu/Wall http://www-fp.mcs.anl.gov/fl/activemural http://www-fp.mcs.anl.gov/fl/publication http://www.ncsa.uiuc.edu/TechFocus/Deployment/DBox http://www.cs.princeton.edu/omnimedia
Resources • VR/Multigraphics http://graphics.stanford.edu/projects/multigraphics http://www.evl.uic.edu/pape/CAVE/linux
Current Projects • Projector Mount Design • Projector Control Software • Auto Projector Alignment • Auto Projector Color and Luminosity Matching • Edge Blending • User Interface Devices • AG integration
Conclusions Linux is a cost effective and rich environment for building large scale tiled display walls.