Adaptive Knee Joint Control for an Active Amputee Prosthesis
180 likes | 359 Vues
5 th Latin American Robotics Symposium – LARS 2008 Salvador, October 29 – 30, 2008. Adaptive Knee Joint Control for an Active Amputee Prosthesis. Glauco Garcia Scandaroli, Geovany Araújo Borges, Adson Ferreira da Rocha, and Francisco Assis de Oliveira Nascimento

Adaptive Knee Joint Control for an Active Amputee Prosthesis
E N D
Presentation Transcript
5th Latin American Robotics Symposium – LARS 2008 Salvador, October 29 – 30, 2008 Adaptive Knee Joint Control for anActive Amputee Prosthesis Glauco Garcia Scandaroli, Geovany Araújo Borges, Adson Ferreira da Rocha, and Francisco Assis de Oliveira Nascimento e-mails: glaucoscn@gmail.com, gaborges@ene.unb.br, adson@ene.unb.br, assis@ene.unb.br. Laboratório de Robótica e Automação (LARA) Grupo de Robótica, Automação e Visão Computacional (GRAV) Departamento de Eng. Elétrica - Universidade de Brasília (UnB) 1
Outline of the presentation • Introduction; • Prosthesis Description; • System Modeling; • Control Strategies; • Conclusions & Ongoing Work. 2
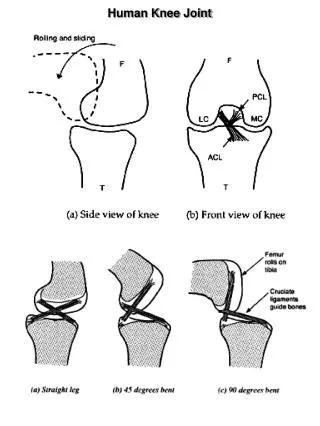
Introduction Rehabilitation robotics: Restoring lost motor functions; Supporting treatment. Importance of knee in locomotion. Active or Passive knee? Three DOF Prosthesis: More similar to human leg.
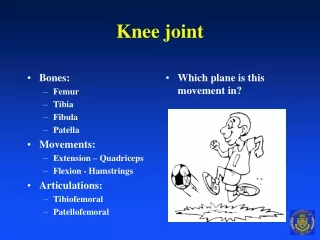
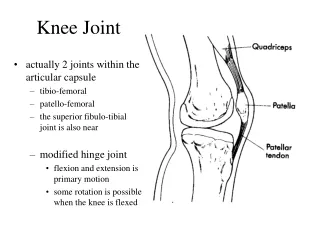
Prosthesis Description • Thee DOF: • Knee (3R15 Otto Bock): • Sagittal Plane. • Foot: • Sagittal Plane; • Frontal Plane. • Actuators: • Servo-Amplifiers + DC Motors. • Movements: • EMG Signals – Knee; • Predictive Model – Foot: • Gyrometers + IR.
System Modeling Simplified Model based on Free Body Diagram. Discrete non-linear model: Variable change: Finally:
System Modeling Parameter Identification: Batch Least Squares. Second order approach: First order approach:
System Modeling Parameter Identification: Batch Least Squares. Second order approach: First order approach:
Control Strategies PID Control: Root-Locus Tuned; Experimentally Tuned. Model Reference Adaptive Control (MRAC). φref . φ ia,k ia controller ν(φk) DAC plant ADC potentiometer
Control Strategies PID – Root Locus Tuned: Kp = 0.0624, Ki = 0.06, Kd = 0.0024, CL Poles: s1 = -4.89, s2 = -0.9917. Rise time: 650 ms.
Control Strategies PID – Root Locus Tuned: Kp = 0.0624, Ki = 0.06, Kd = 0.0024, CL Poles: s1 = -4.89, s2 = -0.9917.
Control Strategies PID – Experimentally Tuned: Kp = 0.1, Ki = 0.111, Kd = 0.0011,
Control Strategies PID – Experimentally Tuned: Kp = 0.1, Ki = 0.111, Kd = 0.0011,
Control Strategies MRAC: Characteristics of reference model: First order; Rise time: 300 ms, Null steady-state error. Parameters: θ1 = 0.099481; θ2 = 0.089133; γ = 1/3.
Control Strategies MRAC: Characteristics of reference model: First order; Rise time: 300 ms, Null steady-state error. Parameters: θ1 = 0.099481; θ2 = 0.089133; γ = 1/3.
Control Strategies MRAC: Characteristics of reference model: First order; Rise time: 300 ms, Null steady-state error. Parameters: θ1 = 0.099481; θ2 = 0.089133; γ = 1/3.
Conclusions & ongoing work System Modeling: First order approximation → No transitory losses. Control Strategies: PID Root-Locus → Steady-state error; PID Experimental → Oscillation, MRAC → Small oscillation. Ongoing work: Control of foot joints; EMG Integration.