Download
1 / 19
380 likes | 841 Vues
Spectrum Sensing In Cognitive Radio Networks. Spectrum Scarcity. Rapid development in wireless communication applications has increased the demand on available wireless spectrum Traditionally the available spectrum is statically allocated by frequency regulation bodies

E N D
Spectrum Scarcity • Rapid development in wireless communication applications has increased the demand on available wireless spectrum • Traditionally the available spectrum is statically allocated by frequency regulation bodies • However, spectrum occupancy measurements shows the underutilization of some licensed bands
Cognitive Radio Networks • Accordingly, dynamic spectrum allocation paradigms emerged, called cognitive radio (CR) networks • Cognitive Radio (CR): capable of sensing operating environment and dynamically utilize available radio resources
Cognitive Radio Networks • Two types of users: • Primary users :users of high priority or legacy rights to use the spectrum. • Secondary users :users with lower priority, who are not assigned a specific frequency band to operate at. • Secondary users can only use the spectrum such that they do not cause interference to primary users
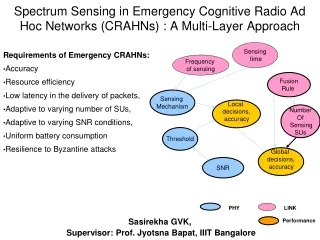
Cognitive Radio Networks • Three main functions to facilitate CR operation: • Spectrum sensing • Spectrum management and hand off • Dynamic spectrum allocation and sharing • Spectrum sensing is a fundamental in CR operation. Its performance decides the level of interference with PUs and spectrum utilization efficiency
The performance of a spectrum sensing techniques can be evaluated using two metrics: • Detection probability: probability that a CR correctly decides that the spectrum is busy, when primary transmission is taking place • False alarm probability: probability that the CR makes a wrong decision that the spectrum is occupied while it is actually not Note: For the spectrum sensing algorithm to be efficient, it should satisfy both high spectral utilization as well as minimal interference with primary users. In other words, the sensing techniques needs to achieve high detection probability and a low false alarm probability, a requirement that seems to be contradicting based on the above graph.
1.Energy Based Sensing • Most common sensing technique with least computational complexity • Secondary user decides whether or not there is primary signal transmitted based on the energy of the received signal x(t). Hence the detection statistics can be defined as follows: Where x(n) is the received signal and Nsis the number of samples over which energy is computed
1.Energy Based Sensing • Let the received signal has the following hypothesis • H0 represents the null hypothesis meaning that there is no primary signal and only AWGN noise exists , H1 describes the existence of a primary user’s signal in addition to AWGN noise • The detection statistics T is compared with a threshold λ to know whether the primary user’s signal exists or not. The primary user’s signal exists only if the detection statistics T is larger than the threshold . • The probability of detection Pd , at hypothesis H1 ,and the probability of false alarm Pf ,at hypothesis H0 ,can therefore be defined as follows: Pd = Pr(T > λ | H1)= Pf = Pr(T > λ| H0)=
2. Spectrum Sensing Based On Statistical Covariance • The received signal under H1 and H0 can be given by: • Considering L samples, define the following vectors (Parameter L is called the smoothing factor: x(n)= [ x(n) x(n-1)…x(n-L-1)]T s(n)= [ s(n) s(n-1)…s(n-L-1)]T η(n)= [η(n) η(n-1)… η(n-L-1)]T Hence, the statistical covariance matrices of the received signal can be defined as: It can be shown that
2. Spectrum Sensing Based On Statistical Covariance • If the signal s(n) is not present Rs=0. Hence, the off-diagonal elements of Rx are all zeros. If there is a signal and the signal samples are correlated, Rs is not a diagonal matrix. Hence, some of the off-diagonal elements of Rx should be nonzero. Denote rnm as the element of matrix Rx at the nth row and mth column, and let • Then, if there is no signal, T1 / T2= 1. If the signal is present, T1 / T2 > 1. Hence, ratio T1 / T2 can be used to detect the presence of the signal.
2. Spectrum Sensing Based On Statistical Covariance • In practice, the statistical covariance matrix can only be calculated using a limited number of available signal samples at the receiver. Hence, we can compute the sample autocorrelations of the received signal as where Ns is the number of available samples
2. Spectrum sensing based on statistical covariance • Statistical covariance matrix Rx can be approximated by the sample covariance matrix defined as • Based on the above sample covariance matrix we can use the Covariance Absolute Value(CAV) detection algorithm
Covariance Absolute Value(CAV) Detection Algorithm • Sample the received signal • Choose a smoothing factor L and a threshold γ1, where γ1 should be chosen to meet the requirement for the probability of false alarm • Compute the autocorrelations of the received signal λ(l), l = 0, 1, . . . , L − 1, and form the sample covariance matrix • Compute • Determine the presence of the signal based on T1 (Ns), T2(Ns), and threshold γ1. That is, if T1(Ns)/T2(Ns) > γ1, the signal exists; otherwise, the signal does not exist.
Theoretical Analysis for the CAV Algorithm • The above proposed CAV algorithm is valid based on the assumption that the transmitted primary signal samples are correlated, i.e., Rs is not a diagonal matrix(Some of the off-diagonal elements of Rsshould be nonzeros) • Obviously, if signal samples s(n) are i.i.d., then in this case, the assumption is invalid, and the algorithm cannot detect the presence of the signal.
Theoretical Analysis for the CAV Algorithm • However, usually, the signal samples should be correlated due to three reasons: • The signal is oversampled • The propagation channel has time dispersion; • The original signal is correlated. In this case, even if the channel is a flat-fading channel and there is no oversampling, the received signal samples are correlated.
Threshold Selection • As mentioned earlier, for a good detection algorithm, a high Pd and low Pf should be achieved. The choice of threshold γ is a compromise between Pdand Pf • Usually, the threshold is chosen such that a certain value of false alarm probability Pfis achieved • The threshold selection can be based on either theoretical derivation or computer simulation: 1- If threshold selection based on computer simulation: • We first set a value for Pf • We find a threshold γ to meet the required Pf : to do so we can generate white Gaussian noises as the input (no signal) and adjust the threshold to meet the Pf requirement. Note that the threshold here is related to the number of samples used for computing the sample autocorrelations and the smoothing factor L
Threshold Selection 2- If theoretical derivation is used: We need to find the statistical distribution of T1(Ns)/T2(Ns) which is generally a difficult task. In [1], using the central limit theorem, the distribution of this random variable is approximated and the theoretical estimations for the two probabilities Pd, Pf and the threshold associated with these probabilities are derived as follows (equations (74)(76)(77) in [1]):
References [1] YonghongZeng and Ying-Chang Liang, “Spectrum-sensing algorithms for cognitive radio based on statistical covariances”, IEEE transactions on vehicular technology. Vol. 58. no. 4, pp.1804-1815, May 2009 [2] Z. Quan,, S. Cui, and A. H. Sayed, "Optimal linear cooperation for spectrum sensing in cognitive radio networks," IEEE Journal of Selected Topics In Signal Processing, vol.2, pp.23 -40, 2008.