Download
1 / 49
490 likes | 657 Vues
This lecture explores the concepts of NP, NP-Hard, and NP-Complete problems in computational theory. It begins by explaining what NP means, highlights common misunderstandings, and introduces the notion of decision problems characterized by nondeterministic Turing machines. The lecture further discusses key examples, such as the Hamiltonian cycle and minimum spanning trees, including how to prove these problems belong to NP. Lastly, it touches on important theorems like Savitch’s theorem and the implications of P vs NP.

E N D
Answer What is NP-complete? What is NP-hard? First, what is NP?
Answer 1 Wrong! Did you take computer science before ?
Answer 2 Still wrong! But, almost true. I can give you a counterexample!
Decision version of Integer Programming
How to prove a decision problem belonging to NP? How to design a polynomial-time nondeterministic algorithm?
we need to study computation model-Turing Machine. To answer,
tape head Finite Control Deterministic Turing Machine (DTM)
e p h B a l a The tape has the left end but infinite to the right. It is divided into cells. Each cell contains a symbol in an alphabet Γ. There exists a special symbol B which represents the empty cell.
a • The head scans at a cell on the tape and can read, erase, and write a symbol on the cell. In each move, the head can move to the right cell or to the left cell (or stay in the same cell).
The finite control has finitely many states which form a set Q. For each move, the state is changed according to the evaluation of a transition function δ : Q x Γ → Q x Γ x {R, L}.
b a • δ(q, a) = (p, b, L) means that if the head reads symbol a and the finite control is in the state q, then the next state should be p, the symbol a should be changed to b, and the head moves one cell to the left. q p
a b • δ(q, a) = (p, b, R) means that if the head reads symbol a and the finite control is in the state q, then the next state should be p, the symbol a should be changed to b, and the head moves one cell to the right. q p
There are some special states: an initial state s and an final states h. • Initially, the DTM is in the initial state and the head scans the leftmost cell. The tape holds an input string. s
x • When the DTM is in the final state, the DTM stops. An input string x is accepted by the DTM if the DTM reaches the final state h. • Otherwise, the input string is rejected. h
Multi-tape DTM Input tape (read only) Storage tapes Output tape (possibly, write only)
tape head Finite Control Nondeterministic Turing Machine (NTM)
e p h B a l a The tape has the left end but infinite to the right. It is divided into cells. Each cell contains a symbol in an alphabet Γ. There exists a special symbol B which represents the empty cell.
The finite control has finitely many states which form a set Q. For each move, the state is changed according to the evaluation of a transition function δ : Q x Γ → 2^{Q x Γ x {R, L}}.
Nondeterministic TM (NTM) • There are multiple choices for each transition. • For each input x, the NTM may have more than one computation paths. • An input x is accepted if at least one computation path leads to the final state. • L(M) is the set of all accepted inputs.
Time of DTM • TimeM (x) = # of moves that DTM M takes on input x. • TimeM(x) < infinity iff x ε L(M).
Space • SpaceM(x) = maximum # of cells that M visits on each work (storage) tapes during the computation on input x. • If M is a multitape DTM, then the work tapes do not include the input tape and the write-only output tape.
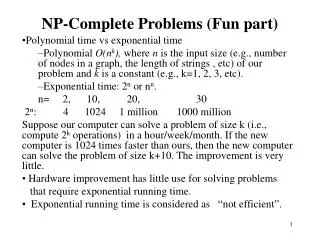
What’s P? • P is a class of decision problems that each can be solved by deterministic TM in polynomial time.
What’s NP? • NP is a class of decision problems that each can be solved by a nondeterministic TM in polynomial time. • NP is a class of decision problems that each can be solved by a polynomial-time nondeterministic algorithm.
What’s PSPACE? • PSPACE is a class of decision problems that each can be solved by TM in polynomial space. • Why didn’t specify Deterministic or Nondeterministic? It doesn’t matter due to Savitch’s Theorem.
P = ? NP = ? PSPACE • They are central problems in computational complexity.
If P = NP, then NP-complete P
Ladner Theorem • If NP ≠ P, then there exists a set A lying -between P and NP-complete class, i.e., A is in NP, but not in P and not being NP-compete.
How to prove a decision problem belonging to NP? How to design a polynomial-time nondeterministic algorithm?
Hamiltonian Cycle • Given a graph G, does G contain a Hamiltonian cycle? • Hamiltonian cycle is a cycle passing every vertex exactly once.
Nondeterministic Algorithm • Guess a permutation of all vertices. • Check whether this permutation gives a cycle. If yes, then algorithm halts. What is the running time?
Guessing Time • Each guess can choose one from a constant number of choices. • This is because that in NTM, the number of choices for each move is independent from input size. • Guessing a permutation of n vertices needs (n long n) time.
Minimum Spanning Tree • Given an edge-weighted graph G, find a spanning tree with minimum total weight. • Decision Version: Given an edge-weighted graph G and a positive integer k, does G contains a spanning tree with total weight < k.
Nondeterministic Algorithm • Guess a spanning tree T. • Check whether the total weight of T < k. This is not clear!
How to guess a spanning tree? • Guess n-1 edges where n is the number of vertices of G. • Check whether those n-1 edges form a connected spanning subgraph, i.e., there is a path between every pair of vertices.
Co-decision version of MST • Given an edge-weighted graph G and a positive integer k, does G contain no spanning tree with total weight < k?
Algorithm • Computer a minimum spanning tree. • Check whether its weight < k. If yes, the algorithm halts.
co-NP • co-NP = {A | Σ* - A ε NP}
NP ∩ co-NP So far, no natural problem has been found in NP ∩ co-NP, but not in P. NP P co-NP
Linear Programming • Decision version: Given a system of linear inequality, does the system have a solution? • It was first proved in NP ∩ co-NP and later found in P (1979).
Primality Test • Given a natural number n, is n a prime? • It was first proved in NP ∩ co-NP and later found in P (2004).
Therefore • A natural problem belonging to NP ∩ co-NP is a big sign for the problem belonging to P.
Proving a problem in NP • In many cases, it is not hard. • In a few cases, it is not easy.
Polynomial-time verification with polynomial-size certificate
Integer Programming • Decision version: Given A and b, does Ax > b contains an integer solution? • The difficulty is that the domain of “guess” is too large, that is, it is not easy to know the existence of polynomial-size certificate.