ACARP project C18023 CM2010 – Continuous Miner Automation
190 likes | 465 Vues
ACARP project C18023 CM2010 – Continuous Miner Automation. Dr David C. Reid Dr Mark Dunn RDTG Operator’s Workshops Sept 2010. Project Overview. Project context CM Automation component of the CM2010 initiative Project grand goal

ACARP project C18023 CM2010 – Continuous Miner Automation
E N D
Presentation Transcript
ACARP project C18023CM2010 – Continuous Miner Automation Dr David C. Reid Dr Mark Dunn RDTG Operator’s Workshops Sept 2010
Project Overview • Project context • CM Automation component of the CM2010 initiative • Project grand goal • A remotely supervised continuous miner for roadway development • Project impact • Essential and major component of CM2010 goals • Immediate health and safety benefits • Immediate productivity benefits • We are now halfway through 3 year project
Enabling Technology • Need to develop navigation system suitable for accurate control of CM • Can’t use GPS underground (without a lot of additional infrastructure) • Technology needs to be physically robust, reliable, accurate and ideally self-contained (doesn’t rely on external infrastructure) • Technology needs to work under all normal CM operating conditions • Inertial navigation meets most of the above criteria • Already proven in longwall mining automation (but higher performance required for CM automation) • Reasonably self contained (but needs odometry/velocity aiding) • Has the additional benefit of providing real-time accurate CM pitch/roll/heading information at the CM • Need to develop a non-contact odometry solution for this system to be practical
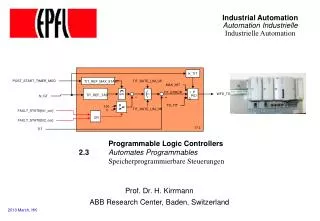
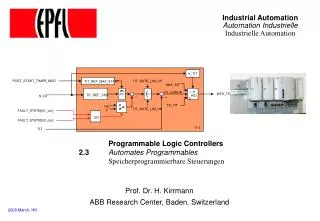
CM Navigation Solution: INS + Odometry INS IMU Navigation Equations Position (AT, CT, VT) Gyros Accels Orientation (Heading pitch Roll) Odometry Aiding Source Process Environment • Presently evaluating INS and Odometry Solutions
Non-Contact Odometry • Inertial navigation system requires an external aiding source to achieve required position accuracy • An accurate non-contact odometer is key to practical CM navigation system: • Needs to be non-contact to be practical • Needs to be rugged-isable • Needs to be immune/tolerant to dust, moisture, vibration • Needs to be very accurate – navigation algorithms are very sensitive to latency (<40mS), accuracy, timing and measurement jitter • Multi-sensor solution provides redundancy benefits
Non-contact Odometry Technologies Mono Stereo Multi Multibeam 3D Scanning Point Doppler e-Steering UWB
Results so far • A CM navigation system has been developed • Non-contact odometry solutions have been developed for velocity aiding using hybrid technologies • Ultra low speed Doppler radar • Optical flow position sensor (like an optical mouse) • A skid steer vehicle The Phoenix has been customised for evaluating the navigation system performance
Mobile CM Test Platform: The Phoenix Non-contact optical flow odometry and very low speed Doppler radar
Test Platform Development: Phoenix • Phoenix provided a realistic CM-like platform for VMS-aided navigation testing • Installation of RTK GPS equipment on Phoenix for ground-truth reference • Installation of RTK surveyed base station at QCAT and radio link to Phoenix • Doppler radar and optical position sensor installed • Sagem Sigma30 INS installed • Custom-developed control and communication systems installed • Navigation experiments conducted on both paved and unpaved (rough) tracks
Results: CM Attitude Monitoring Accurate heading/pitch/roll information available on CM
Phoenix Navigation Testing Area • Test tracks – monorail/paved road and rough unpaved track
Phoenix Navigation Testing • [external video]
Next Stages • Further enhancement to the navigation solutions • Additional evaluation with lower performance inertial system • Further control system development • Development of Mine-To-Plan software tool • Field trials • Quarry • Underground
Summary • A practical CM navigation systems has been developed and demonstrated under limited operating conditions • New non-contact odometry technologies have been demonstrated • Further development and testing required under more realistic operating conditions
Thank you Contact Us Phone: 1300 363 400 or +61 3 9545 2176 Email: enquiries@csiro.au Web: www.csiro.au Exploration and Mining Dr David C. Reid Principal Research Engineer Dr Mark T Dunn Research Engineer Phone: 07 3327 4437 Email: david.reid@csiro.au