Download
1 / 98
980 likes | 1.04k Vues
Learn about simple and compound machines, mechanical design, kinematics, gears, and mechanisms in robotics class. Explore practical applications, project ideas, and how to apply these concepts in robot design. Homework includes creating a kinematic model for your robot.

E N D
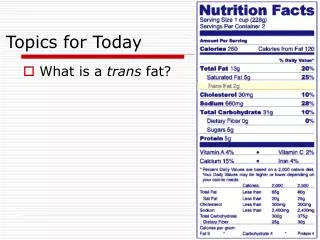
Topics to discuss today • Simple machines • Compound machines • Lever • Linkage • Wedge • Mechanical Advantage • Inclined plane • Screw
To do in class • Mechanical design is an important component of this class – how it relates to your project • What you want to learn? • What you plan to do?
This material is easy and part of it you can read by yourself. • When you read it, please think how you can apply these ideas in practical robots. • Look also to internet to find who sells these and similar items that can be used in your robot
Conclusion on projects • Mechanical design is an important component of this class • This class is not only programming, you have to pay more attention to mechanical and interfacing aspects of robot design. • Robot programming is different from standard programming, it is a real time application programming.
Levels of robot creation Robot System Integration Robot Application Programming Robot Teaching Robot Language Robot System Architecture Internet MOTORS and ACTUATORS Sensor and Vision Mechanical Robot Design • A class as a whole covers all of the above • Your project(s) should cover few of these
Part of your Homework • Create a model, as in the previous two slides, for your robot • Write all necessary data for torques, angles and length of arms etc.
Kinematics • The study of motion without regard to the forces or mass of the things moving. • Kinematic diagrams are scaled drawings symbolizing how mechanisms work. • We study robot kinematics in Fall • We study dynamics in Winter
Gears • Pulleys • Chains • Cams • Bearings • Wheel and Axle • Inclined Plane • Wedge • Screw • Lever • Cranks and sliders • Ratcheting mechanisms • Clutches • Brakes Examples of machines
Machines and Tools • Machines and tools are mechanical devices that work by transmitting or converting energy. • Machines are made up of a variety of mechanisms. • What are some examples of machines?
Simple Machines Screw Inclined Plane Wedge Pulley Wheel and Axle Lever All of these are related to robotics. Think how?
Mechanisms • Mechanisms help extend human capability by creating some desired output or motion. • A mechanism takes an input motion or force and creates a desired output motion or force. MECHANISM Motion or force Motion or force
Types of Motion • Common types of motion: • Linear • Reciprocal • Rotary • Oscillating All these have applications in robotics
Definitions: Energy: Ability to do work Work = Force * Distance Force: A Push or a Pull
counter weight motor Rotating Arms Torques in arm design are largeUse counterweights and gears to compensateAttach the gear to the armAttach the motor to the robot gear bolted to arm driven gear
Role of Linkages • Linkages transmit the motion or force to the desired output location. • Linkages: • change the direction of the force • Change the length of motion of the force • Split the motion and force over multiple paths
Lever Pivot point, fulcrum • Downward motion at one end results in upward motion at the other end. • Depending on where the pivot point is located, a lever can multiply either the force applied or the distance over which the force is applied http://www.csmate.colostate.edu/cltw/cohortpages/viney/balance.html
Explanation Simple Lever Machine • This simple machine is based on the position of the effort force, resistance force, and fulcrum. • First class lever • Fulcrum located between effort force and resistance force • Usually used to multiply a force • Example: Seesaw This kind of lever changes the direction of force. R Resistance force Effort force E F length1 length2 R * length1 = E * lenght2
Engagement Simple Experiment: Balancing Act • Using only a meter stick and a wooden block, balance two masses in a seesaw kind of structure. • How did you get them to balance? • Could you do it in one try? • Compare your setup with other possible setups Do this by yourself, not in class This is useful in robot arm design
Exploration Simple Experiment: Balancing Act Lever Forces • Materials • Computer/calculator • Force Probe • 500g mass • String • Meter stick • Wooden Block We do such projects in High school robotics Do not discuss next 2 slides in class
Exploration Simple Experiment: Balancing Act Lever Forces • Measure the Weight of the 500g mass (in Newtons). • Balance the middle of the meter stick on the wooden block. • Place the 500g mass at the 90 cm line. • Attach the string to the meter stick at the 10 cm line. • Attach the string to the force meter and pull down on the sensor until the meter stick is balanced. • Record the force needed to balance the meter stick. • Repeat the above steps with the 500g mass at the 70 cm line and the 60 cm line.
Exploration Simple Experiment: Balancing Act Lever Forces • After recording your data in a table, perform the following calculations for the three trials: • Divide the weight of the 500g mass by the force required to balance the meter stick. • Divide the distance between the force meter and the wooden block by the distance between the 500g mass and the wooden block. • How do these numbers compare? • What do these numbers indicate about the lever system?
Explanation Why use a Simple Machine? • Simple Machines make work easier by giving the user a mechanical advantage. • How do we calculate the mechanical advantage for a lever system? • Ideal Mechanical Advantage (IMA) = Leffort / Lresistance • Why do we stipulate that the MA is ideal? Because we’ve assumed that the machine puts out exactly as much work as we put in. This implies 100% efficiency • This situation is never possible…why? Leffort is the distance between the effort force and the fulcrum Lresistance is the distance between the resistance force and the fulcrum Mechanical Advantage = MA 100% efficiency is never possible because of FRICTION.
Explanation Lever Example • A worker uses an iron bar to raise a manhole cover that weighs 90 Newtons. The effort arm of the bar is 60 cm long and the resistance arm is 10 cm long. • Draw a picture of this scenario • Calculate the IMA of the lever system IMA = Le/Lr = 60 cm/ 10cm = 6 • What force would the worker need to apply to lift the manhole? • We need 90 N of force to lift the manhole cover, but we have a mechanical advantage of 6. • Now we only need 15 N of force to lift the manhole. ? 90 N
Classes of Levers “First Class Lever” • A first-class lever is a lever in which the fulcrum is located between the input effort and the output load. • In operation, a force is applied (by pulling or pushing) to a section of the bar, which causes the lever to swing about the fulcrum, overcoming the resistance force on the opposite side. • The fulcrum may be at the center point of the lever as in a seesaw or at any point between the input and output. • This supports the effort arm and the load. Examples: • Seesaw • Scissors (double lever)
First Class Lever Fulcrum is between EF (effort) and RF (load)Effort moves farther than Resistance.Multiplies EF and changes its directionThe mechanical advantage of a lever is the ratio of the length of the lever on the applied force side of the fulcrum to the length of the lever on the resistance force side of the fulcrum. Effort fulcrum Resistance
Examples of first class levers Common examples of first-class levers include • crowbars, • scissors, • pliers, • tin snips • and seesaws.
Second Class Lever RF (load) is between fulcrum and EF Effort moves farther than Resistance.Multiplies EF, but does not change its directionThe mechanical advantage of a lever is the ratio of the distance from the applied force to the fulcrum to the distance from the resistance force to the fulcrum. Effort Resistance
Explanation Three Lever Classes • Second class lever • Resistance is located between the effort force and the fulcrum. • Example: Wheelbarrow E R F Always multiplies a force.
Examples of Second class levers Examples: • Paddle • Wheelbarrow • Wrench
Examples of second-class levers • Examples of second-class levers include: • nut crackers, • wheel barrows, • doors, • and bottle openers.
Third Class Lever EF is between fulcrum and RF (load) Does not multiply force Resistance moves farther than Effort.Multiplies the distance the effort force travelsThe mechanical advantage of a lever is the ratio of the distance from the applied force to the fulcrum to the distance of the resistance force to the fulcrum
Classes of Levers “Third Class Lever” Examples: • Hockey Stick • Tweezers • Fishing Rod • For this class of levers, the input effort is higher than the output load, which is different from second-class levers and some first-class levers. • However, the distance moved by the resistance (load) is greater than the distance moved by the effort. • In third class levers, effort is applied between the output load on one end and the fulcrum on the opposite end.
Explanation Three Lever Classes • Third class lever conclusions • Effort force located between the resistance and the fulcrum. • Effort arm is always shorter than resistance arm • MA is always less than one • Example: Broom E R F There is an increase distance moved and speed at the other end. Other examples are baseball bat or hockey stick.
Examples of Third Class Levers • Examples of third-class levers include: • tweezers, • arm hammers, • and shovels. Third class lever in human body.
Elaboration Natural Levers • Identify an example of a 1st class lever in the human body Example of first class lever in human body Remember to relax the body and feel the muscle groups working to move the bones
Elaboration Natural Levers in human body • Identify an example of a 2nd class lever in the human body Second class lever in human body Remember to relax the body and feel the muscle groups working to move the bones
Elaboration Natural Levers in human body • Identify an example of a 3rd class lever in the human body Remember to relax the body and feel the muscle groups working to move the bones