ASAP Progress Report Adaptive Sampling and Cooperative Control
220 likes | 237 Vues
Detailed report on the design, coordination, and adaptation strategies for a glider array used in ocean monitoring. Objectives include optimal trajectory design, feedback control algorithms, and adaptation techniques.

ASAP Progress Report Adaptive Sampling and Cooperative Control
E N D
Presentation Transcript
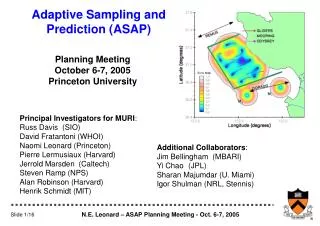
ASAP Progress Report Adaptive Sampling and Cooperative Control Naomi Ehrich Leonard Francois Lekien, Derek Paley, Fumin Zhang Mechanical and Aerospace Engineering Princeton University naomi@princeton.edu http://www.princeton.edu/~naomi
Coordinated Array Design Cooperative Control Law Gliders Model Sensor measurements Relative positions, currents • At least nine gliders to be used for adaptive sampling on boundaries and in interior of the “box”. • Adaptive sampling should minimize model error by (1) maximizing coverage, (2) finding fronts, and (3) observing local changes in the heat budget. • Three central tasks: 1. Design trajectories for glider array. Optimal trajectories will require coordinated design -- relative positions of all gliders central to the design. 2. Design feedback control algorithms to ensure coordination of gliders, in spite of currents, unexpected events, other perturbations. 3. Design feedback algorithms for adaptation of trajectories for glider array in response to changing ocean dynamics and changing operational conditions. Overview
1. Glider Array Design: Objectives • Use approximate model to derive optimal trajectories that maximize information to full model. • Requires evaluation that optimal plan from approximate model enhances performance of full model. • Match array design to ocean processes we want to observe including • Migration of warm water offshore during upwelling, onshore migration during relaxation, pattern of these processes south of Ano Nuevo, 3-D effects, location of horizontal divergence, how deeply surface and bottom mixing penetrates stratified water column, special patterns around topography. • Design how gliders should be coordinated to realize full potential of array. • Accommodate influence of flow field on glider navigation in array design. • Tradeoffs between optimality and robustness. • Evaluate effectiveness of glider array design.
Coordinated Array Design Cooperative Control Law Gliders 2 . Feedback Control for Glider Coordination: Objectives Model Sensor measurements Relative positions, currents • Constant glider speed relative to flow. • Relative position measurements computed every two hours and estimates of other glider positions used. • Feedback should keep the gliders in their optimal relative positions despite currents that push the gliders away from the prescribed trajectories.
Coordinated Array Design Cooperative Control Law Gliders 3. Adaptation of Array Design: Objectives Model Sensor measurements Relative positions, currents • To “close the loop”, quantify effect of increased knowledge on design of coordinated trajectories. • Use sensor data from gliders to re-determine metric and then recompute array design. • Accommodate changes in ocean processes (using updated model estimates) and changes in operations (e.g., add/subtract glider). • In case of feature tracking, use sensor data directly to influence changes in subarray (path and shape).
1. Glider Array Design: Approach Derive performance of sampling array from linear data assimilation scheme Choose metric to be functional of error in the best linear estimate of final state (after data has been assimilated).
Search for trajectories corresponding to a global minimum of the metric. Design near-optimal trajectories: Use parametrized family of “simple” shapes. Parameters include shape, size, orientation # simple shapes to cover region. # of sensors per shape. Relative positions of all sensors. Choose near optimal solutions where value of metric is at plateau for robustness. Glider Array Design: Approach cont.
Sampling Metric from Objective Analysis Represent ocean with finite number of random variables: Measurement matrix represents influence of M measurements on N grid points: Priori covariance between two grid points approximated from past observations: Posteriori covariance of best linear estimate: Metrics:
Computation of Optimal Trajectories • Box: • Trajectories: • Constraint: • Optimality Trajectories:
Computation of Optimal Trajectories • A Priori Correlation: • Scaled Trajectories: • Size and shape: • Speed and time: • Constraint:
Minimum Error The value of the metric() does not depend on is a function of (and ) only!
Optimal Solution for Ellipses For ellipses, the optimum is at Corresponds to one glider per region of area
Sub-sampling Sample small scale gradients and keep an acceptable model error? Dramatic increase below Sub-sampling limited to
Smallest Sub-Sampling Scale Minimum sub-sampling scale for : Minimum side of a triangle of 3 gliders: August 16, 2003
Thermal Front Parameter (TFP) • Thermal Front • Warm / Cold Fronts Level Sets and Front Tracking
2. Feedback Control for Glider Coordination • Feedback control laws and convergence proofs for coordinating constant speed • vehicles to move around closed paths with uniform inter-vehicle spacing.
vehicle Feedback Control for Glider Coordination • Feedback provides robustness to small perturbations. In progress: • Improving robustness to currents. • Coordination with reduced “communication”, I.e., each glider to know relative position • with respect to only subset of other gliders.
3. Adaptation of Array Design 1) For metric, evaluate a priori covariance from unstructured data collected by sensors. 2) Consider inhomogeneous statistics. Reveals importance of currents (e.g., high correlation along a jet, low correlation across a jet). 3) Consider capturing inhomogeneity with advection term. 4) Possibly use potentials to direct array to processes of interest.
Example: Double-Gyre Model • Test flow field:
Final Remarks and Future Directions • Metric based on objective analysis error map. Starting point is homogeneous, isotropic field. Considering different ways to augment approach to ensure that arrays are well matched (and can adapt) to ocean processes that we want to observe. • Near-optimal glider trajectories from parameterization of simple shapes. Parametrization includes relative positions of gliders. • Numerical studies with elliptical trajectories yield preliminary results on nature of near-optimal solutions. Work still to be done to find complete near-optimal coordinated array solutions. • Can choose among near-optimal solutions: seek a solution that aids robustness to currents and contributes to better computing the metric. • Need still to fully address transit problem, I.e., how best to bring glider(s) from deployment to near-optimal glider array. Approach: combine sampling metric with minimum-time (or energy) metric (see Jerry’s talk). • Evaluate performance of near-optimal glider arrays first in simulation. • Develop means to evaluate success of glider array and adaptation for the experiment. • Use at least 9 gliders for coverage of “the box”. • Propose testing new level set/front tracking algorithms with gliders (perhaps before or after main glider array coverage experiment).