Download
1 / 1
10 likes | 148 Vues
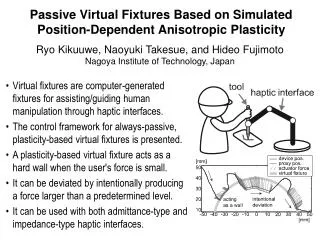
This paper presents a control framework for always-passive, plasticity-based virtual fixtures designed to assist human manipulation through haptic interfaces. The innovative virtual fixture system behaves like a rigid wall under small user forces, but allows for controlled deviation when forces exceed a predetermined threshold. This framework is compatible with both admittance-type and impedance-type haptic systems. The research contributes to the development of safer and more intuitive haptic guidance in human-machine interactions, enhancing user experience in various applications.

E N D
Passive Virtual Fixtures Based on Simulated Position-Dependent Anisotropic Plasticity Ryo Kikuuwe, Naoyuki Takesue, and Hideo FujimotoNagoya Institute of Technology, Japan • Virtual fixtures are computer-generated fixtures for assisting/guiding human manipulation through haptic interfaces. • The control framework for always-passive, plasticity-based virtual fixtures is presented. • A plasticity-based virtual fixture acts as a hard wall when the user's force is small. • It can be deviatedby intentionally producing a force larger than a predetermined level. • It can be used with both admittance-type and impedance-type haptic interfaces.