Download
1 / 13
130 likes | 160 Vues
Explore an architecture-independent approach for quantization-only systems and solutions, focusing on input-to-state stability in the presence of actuator errors. Learn about small gain arguments and dynamic quantization techniques for achieving global asymptotic stability.

E N D
QUANTIZATION and DELAY EFFECTSin NONLINEAR CONTROL SYSTEMS Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign Notre Dame, Oct 18, 2005
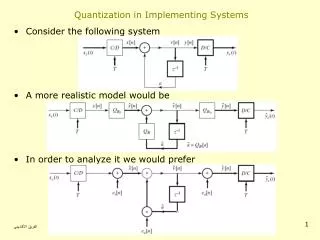
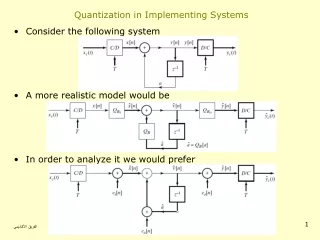
PROBLEM FORMULATION QUANTIZER DELAY Architecture-independent approach
QUANTIZATION ONLY quantization error Assume
QUANTIZATION ONLY Solutions that start in enter and remain there This is input-to-state stability (ISS) w.r.t. actuator errors In time domain: [Sontag ’89] quantization error Assume
QUANTIZATION and DELAY where Assuming ISS w.r.t. actuator errors as before: In time domain:
SMALL–GAIN ARGUMENT if [Teel, IEEE TAC, Jul ’98] then we recover ISS w.r.t. hence ISS property becomes Small gain:
FINAL RESULT Need: small gain true
FINAL RESULT Need: small gain true
FINAL RESULT Need: small gain true
FINAL RESULT Need: small gain true
FINAL RESULT solutions starting in enter and remain there Need: small gain true
VARIATIONS globally asymptotically stabilizing we have Need ISS with respect to measurement errors (or work with small ) DELAY QUANTIZER • Relaxing ISS assumption Previous approach works if is sufficiently small • Different system architecture • External disturbances
DYNAMIC QUANTIZATION – zooming variable Hybrid quantized control: is discrete state zoom in zoom out ISS from to small-gain condition ISS from to http://decision.csl.uiuc.edu/ liberzon Can recover global asymptotic stability [Nesic-Liberzon ’05]