Download
1 / 2
20 likes | 125 Vues
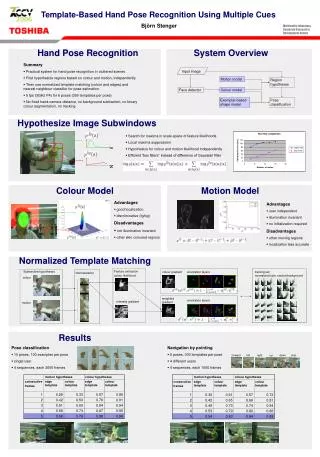
This paper presents a scalable tree-based approach for simultaneously recognizing objects and estimating poses. The system utilizes a tree of classifiers for object recognition and pose estimation, leveraging state-of-the-art features extracted from RGB and depth images. With a near real-time performance of approximately one second, it achieves less than 30° pose estimation error on 300 everyday objects in the RGB-D Object Dataset. The research will be presented at the Twenty-Fifth Conference on Artificial Intelligence (AAAI) in August 2011.

E N D
A Scalable Tree-based Approach for Joint Object and Pose Recognition Kevin Lai, Liefeng Bo, Xiaofeng Ren, and Dieter Fox
A Scalable Tree-based Approach for Joint Object and Pose Recognition • Tree of classifiers for object recognition and pose estimation • State-of-the-art features (kernel descriptors) extracted from RGB and depth images • Near real-time performance (~1 second) • < 30° pose estimation error on 300 everyday objects(RGB-D Object Dataset) To appear in the Twenty-Fifth Conference on Artificial Intelligence (AAAI), August 2011