Rotation and Torque
Rotation and Torque. Lecture 09 Thursday: 12 February 2004. ROTATION: DEFINITIONS. Angular position: q Angular displacement: q 2 – q 1 = D q. Instantaneous Angular velocity: . What is the direction of the angular velocity?. Use your right hand

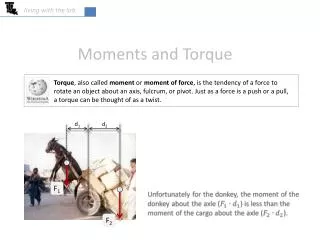
Rotation and Torque
E N D
Presentation Transcript
Rotation and Torque Lecture 09 Thursday: 12 February 2004
ROTATION: DEFINITIONS • Angular position: q • Angular displacement: q2 – q1 = Dq • Instantaneous Angular velocity:
What is the direction of the angular velocity? • Use your right hand • Curl your fingers in the direction of the rotation • Out-stretched thumb points in the direction of the angular velocity
Direction of Angular Acceleration The easiest way to get the direction of the angular acceleration is to determine the direction of the angular velocity and then… • If the object is speeding up, velocity and acceleration must be in the same direction. • If the object is slowing down, velocity and acceleration must be in opposite directions.
For constant a • x® q • v ® w • a® a
Three Accelerations • Centripetal Acceleration • (radial component of the linear acceleration) • -always non-zero in circular motion. • Tangential Acceleration • (component of linear acc. along the direction of the velocity) • -non-zero if the object is speeding up or slowing down. • Angular Acceleration • (rate of change in angular velocity) • -non-zero is the object is speeding up or slowing down.
Energy Considerations Although its linear velocity v is zero, the rapidly rotating blade of a table saw certainly has kinetic energy due to that rotation. How can we express the energy? We need to treat the table saw (and any other rotating rigid body) as a collection of particles with different linear speeds.
Defining Rotational Inertia • The larger the mass, the smaller the acceleration produced by a given force. • The rotational inertia I plays the equivalent role in rotational motion as mass m in translational motion. • I is a measure of how hard it is to get an object rotating. The larger I, the smaller the angular acceleration produced by a given force.
Determining the Rotational Inertia of an Object I is a function of both the massand shape of the object. It also depends on the axis of rotation. • For common shapes, rotational inertias are listed in tables. A simple version of which is in chapter 11 of your text book. • For collections of point masses, we can use : • where r is the distance from the axis (or point) of rotation. • For more complicated objects made up of objects from #1 or #2 above, we can use the fact that rotational inertia is a scalar and so just adds as mass would.
Comparison to Translation • x® q • v ® w • a® a • m®I • K=1/2mv21/2I2
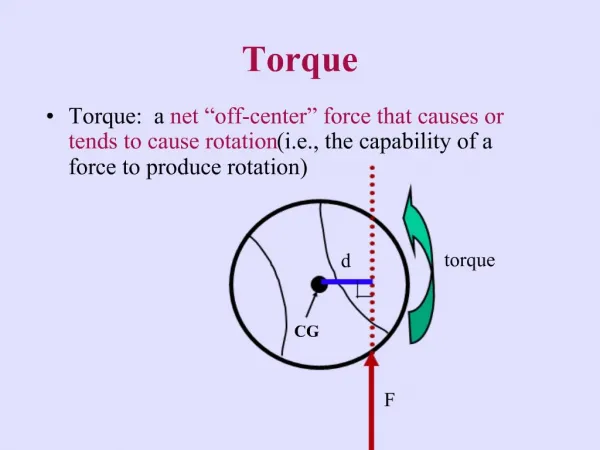
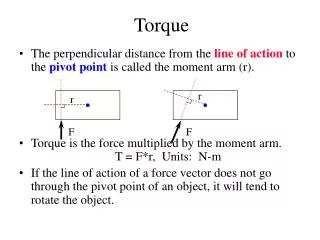
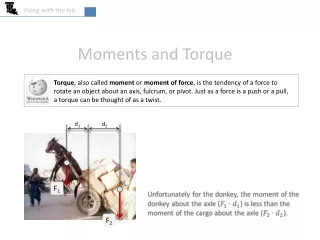
Torque as a Cross Product (Like F=Ma) The direction of the Torque is always in the direction of the angular acceleration. • For objects in equilibrium, =0 AND F=0
Torque Corresponds to Force • Just as Force produces translationalacceleration (causes linear motion in an object starting at rest, for example) • Torque produces rotational acceleration (cause a rotational motion in an object starting from rest, for example) • The “cross” or “vector” product is another way to multiply vectors. Cross product results in a vector (e.g. Torque). Dot product (goes with cos ) results in a scalar (e.g. Work) • r is the vector that starts at the point (or axis) of rotation and ends on the point at which the force is applied.
An Example Forces on “extended” bodies can be viewed as acting on a point mass (with the same total mass) At the object’s center of mass (balancing point) x W
Angular Momentum of a Particle • Angular momentum of a particle about a point of rotation: • This is similar to Torques
P r r P Find the direction of the angular momentum vector-Right hand rule
Does an object have to be moving in a circle to have angular momentum? • No. • Once we define a point (or axis) of rotation (that is, a center), any object with a linear momentum that does not move directly through that point has an angular momentum defined relative to the chosen center as