CHAPTER 14 Vectors in three space
CHAPTER 14 Vectors in three space. Team 6: Bhanu Kuncharam Tony Rocha- Valadez Wei Lu. 14.6 Non-Cartesian Coordinates. The position vector R from the origin of Cartesian coordinate system to the point (x(t), y(t), z(t)) is given by the expression.

CHAPTER 14 Vectors in three space
E N D
Presentation Transcript
CHAPTER 14 Vectors in three space Team 6: Bhanu Kuncharam Tony Rocha-Valadez Wei Lu
14.6 Non-Cartesian Coordinates The position vector R from the origin of Cartesian coordinate system to the point (x(t), y(t), z(t)) is given by the expression The vector expression for velocity is given by The vector expression for acceleration is given by A Cartesian coordinate system (by MIT OCW) http://www.wepapers.com/Papers/4521/1_Newton's_Laws,_Cartesian_and_Polar_Coordinates,_Dynamics_of_a_Single_Particle
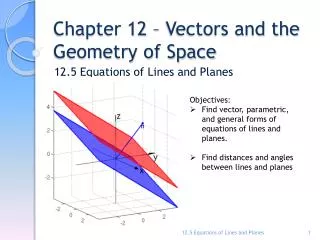
14.6.1 Plane polar coordinate Definitions: P(r, θ) To define the Polar Coordinates of a plane we need first to fix a point which will be called the Pole (or the origin) and a half-line starting from the pole. This half-line is called the Polar Axis. r θ Polar Axis Polar Angles: The Polar Angle θ of a point P, P ≠ pole, is the angle between the Polar Axis and the line connecting the point P to the pole. Positive values of the angle indicate angles measured in the counterclockwise direction from the Polar Axis. The Polar Coordinates (r,θ) of the point P, P ≠ pole, consist of the distance r of the point P from the Pole and of the Polar Angle θ of the point P. Every (0, θ) represents the pole. http://www.geom.uiuc.edu/docs/reference/CRC-formulas/node5.html
Plane polar coordinate More than one coordinate pair can refer to the same point. All of the polar coordinates of this point are: http://www.geom.uiuc.edu/docs/reference/CRC-formulas/node5.html
Plane polar coordinate Difference quotient method to get What is ? Greenberg, M. D. (1998). Advanced Engineering Mathematics (2nd ed.): Prentice Hall.
Plane polar coordinate Difference quotient method to get What is ? Greenberg, M. D. (1998). Advanced Engineering Mathematics (2nd ed.): Prentice Hall.
Plane polar coordinate Transform method to get
The expressions of R, v, a in polar coordinates A polar coordinate system (by MIT OCW) http://www.wepapers.com/Papers/4521/1_Newton's_Laws,_Cartesian_and_Polar_Coordinates,_Dynamics_of_a_Single_Particle
(r,,z) r r 14.6.2 Cylindrical coordinates Cylindrical coordinates are a generalization of two-dimensional polar coordinates to three dimensions by superposing a height z axis. A cylindrical coordinate system http://mathworld.wolfram.com/CylindricalCoordinates.html
Cylindrical coordinates Definitions: The relations between cylindrical coordinates and Cartesian coordinates. The expressions of position R, velocity v, and acceleration a in Cylindrical coordinates are given by • Greenberg, M. D. (1998). Advanced Engineering Mathematics (2nd ed.): Prentice Hall.
Cylindrical coordinates Example1: Find the cylindrical coordinates of the point whose Cartesian coordinates are (1, 2, 3) Answer: Example2: Find the Cartesian coordinates of the point whose cylindrical coordinates are (2, Pi/4, 3) Answer: http://mathworld.wolfram.com/CylindricalCoordinates.html
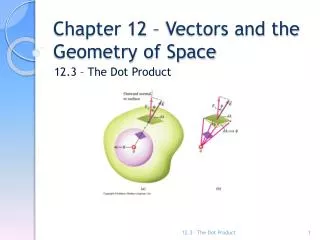
14.6.3 Spherical coordinates Spherical coordinates, also called spherical polar coordinates (Walton 1967, Arfken 1985), are a system of curvilinear coordinates that are natural for describing positions on a sphere or spheroid. Define to be the azimuthal angle in the -plane from the x-axis with (denoted when referred to as the longitude), to be the polar angle (also known as the zenith angle and colatitude, with where is the latitude) from the positive z-axis with , and to be distance (radius) from a point to the origin. (x,y,z) r z
Spherical coordinates The expressions of Spherical coordinates for velocity and acceleration
The expressions of R, v, a in Spherical coordinates Figure taken from reference: http://mathworld.wolfram.com/SphericalCoordinates.html
Examples: The expressions of R, v, a in Non-Cartesian coordinates Example 3 Calculate the three components of the position, velocity and acceleration vectors at t=3. The position of the point R is given by R=(t, exp(t), 3t ). Do this for the in Cartesian coordinates, Cylindrical coordinates, and Spherical coordinates Solution: In Cartesian Coordinates:
The expressions of R, v, a in Non-Cartesian coordinates In Cylindrical Coordinates: Solution: put into get
The expressions of R, v, a in Non-Cartesian coordinates Solution: In Spherical Coordinates: put into get
14.6.4 Omega Method Using the omega method derive the space derivatives of base vectors Consider a rigid body B undergoing an arbitrary motion through 3-space. And let A be any fixed vector with B, that is, A is a vector from one material point in B to another so is constant with time, because b is rigid. Thus A=A(t) Fixed vector in B • Greenberg, M. D. (1998). Advanced Engineering Mathematics (2nd ed.): Prentice Hall. There exists a vector such that There exists a vector such that
Omega method Omega Method Since A is arbitrary: Since B is arbitrary: So we get
Omega method Omega Method In cylindrical coordinates: Let A be : Using chain differentiation to write: Similarly, let A be : Let A be :